
【導讀】四管同步BuckBoost升降壓變換器為單電感結(jié)構(gòu),不需要耦合電容,盡管系統(tǒng)需要四個開關(guān)管,控制相比較復(fù)雜,但由于采用同步的變換器,系統(tǒng)的效率比SEPIC高,而且體積比SEPIC小,非常適用于汽車及通訊這類系統(tǒng)的效率和體積要求嚴格的應(yīng)用。下面本文將討論這種四管同步BuckBoost升降壓變換器的具體的工作原理及設(shè)計過程的相關(guān)問題。
電子系統(tǒng)的一些應(yīng)用中由于輸入電壓的變化,電源的輸出可能低于輸入電壓也可能高于輸入電壓,對于非隔離的電源變換器,這時候要采用升降壓的拓樸結(jié)構(gòu)。常用的升降壓拓樸結(jié)構(gòu)SEPIC需要二個電壓,中間還需要耦合電容,因此當輸出功率較大時,電感和電容的體積大,成本高,而且整機系統(tǒng)效率差。
1、四管同步BuckBoost升降壓變換器工作原理
四管同步BuckBoost升降壓變換器的拓樸結(jié)構(gòu)如圖1所示,其中Cin和Cout分別為輸入和輸出直流濾波電容,A和B為輸入側(cè)功率開關(guān)管,C和D為輸出側(cè)功率開關(guān)管,可以看出:四個開關(guān)管結(jié)構(gòu)類似于全橋的結(jié)構(gòu):A和B及C和D分別類似于全橋電路的二個橋臂,L為功率電感。
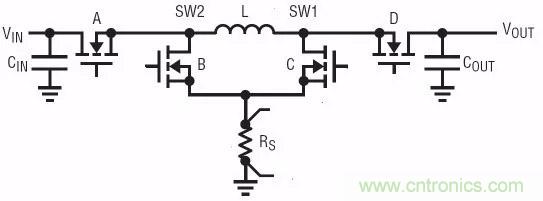
圖1:四管同步BuckBoost升降壓變換器拓樸結(jié)構(gòu)
下面分三個模式說明這種電路結(jié)構(gòu)的工作原理。
1.1、模式1:同步Buck模式,Vin>Vout+△V
當輸入電壓比輸出電壓高△V時,開關(guān)管D保持常開,開關(guān)管C保持常關(guān),開關(guān)管A和B工作于同步的Buck模式。其工作原理與一般的同步的Buck工作原理完全相同,控制的方法為谷點電流模式,如圖2所示,其中D為占空比。
D=Vo/Vin
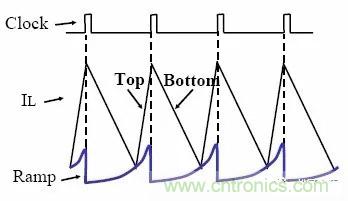
圖2:同步Buck模式
1.2、模式2:降壓BuckBoost模式,Vout<Vin<Vout+△V
當輸入電壓比輸出電壓低△V,即輸入電壓略高于輸出電壓時,系統(tǒng)工作于降壓式BuckBoos模式。開關(guān)周期起始時,開關(guān)管B/D先同時導通,然后A/C同時導通,最后是A/D同時導通,即開關(guān)管導通的順序為:B/D–A/C–A/D。
開關(guān)管B/D同時導通,導通時間為△tBD,電感去磁,則有:
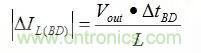
式中:△IL為電感電流的紋波。
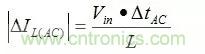
開關(guān)管A/C同時導通時,導通時間為△tAC,電感激磁:
開關(guān)管A/D同時導通時,導通時間為△tAD,電感繼續(xù)激磁:
考慮到磁通在每個開關(guān)周期必須復(fù)位,則有:
所以可以得到:
對于降壓BuckBoost變換器,調(diào)節(jié)△tAC小于△tBD就可以控制系統(tǒng)得到正確的輸出,△tAD值遠大于△tAC和△tBD。當輸入電壓略大于輸出電壓且輸入電壓非常接近輸出電壓時系統(tǒng)進入降壓BuckBoost工作模式,電路的控制和工作波形見圖3所示。
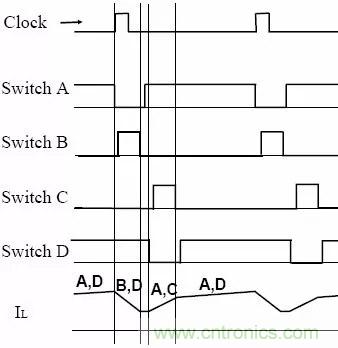
圖3:降壓BuckBoost工作模式
1.3、模式3:升壓BuckBoost模式,Vin<Vout<Vin+△V
輸出電壓比輸入電壓高△V,即輸入電壓略低于輸出電壓時,系統(tǒng)工作于升壓BuckBoos模式。開關(guān)周期起始時,開關(guān)管A/C先同時導通,然后B/D同時導通,最后是A/D同時導通,即開關(guān)管導通的順序為:A/C–B/D–A/D。
開關(guān)管A/C同時導通時,導通時間為△tAC,電感激磁:
式中:△IL為電感電流的紋波。
開關(guān)管B/D同時導通時,導通時間為△tBD,電感去磁:
開關(guān)管A/D同時導通時,導通時間為△tAD,電感繼續(xù)去磁:
考慮到磁通在每個開關(guān)周期必須復(fù)位,則有:
所以可以 得到:
升壓BuckBoost模式和降壓BuckBoost模式的公式完全一樣,調(diào)節(jié)△tAC大于△tBD就可以控制系統(tǒng)得到正確的輸出。當輸入電壓略小于輸出電壓且即輸入電壓非常接近輸出電壓時系統(tǒng)進入升壓BuckBoost工作模式,電路的控制和工作波形見圖4所示。
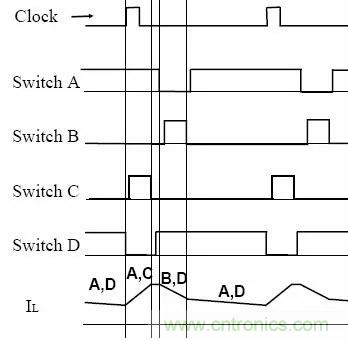
圖4:升壓BuckBoost工作模式
升壓和降壓BuckBoost模式控制策略稍有不同:
(1) 降壓BuckBoost模式仍然是降壓模式,所以要先深去磁,再短時間的深激磁,然后長時間的淺激磁;
(2) 升壓BuckBoost模式仍然是升壓模式,所以要先深激磁,再短時間的深去磁,然后長時間的淺去磁。
BuckBoost模式下輸入電壓和輸出電壓非常接近,輸入和輸出基本上長時間保持直通,開關(guān)狀態(tài)工作的時間很短,控制器通過內(nèi)部的調(diào)節(jié)使系統(tǒng)工作于升壓或降壓BuckBoost模式。
1.4、模式4:同步Boost模式,Vout>Vin+△V
當輸入電壓比輸出電壓低△V時,開關(guān)管A保持常開,開關(guān)管B保持常關(guān),開關(guān)管C和D工作于同步Boost模式。其工作原理與一般的同步Boost工作原理完全相同,控制的方法為峰值電流模式,如圖5所示。
Vo/Vin=1/(1-D)
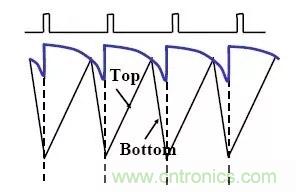
圖5:同步Boost模式
2、 四管同步BuckBoost升降壓變換器電感的設(shè)計
四管同步BuckBoost升降壓變換器采用單電感的結(jié)構(gòu),這種拓樸結(jié)構(gòu)根據(jù)輸入電壓和輸出電壓的不同,工作于降壓Buck或升壓Boost模式,電感的設(shè)計要考慮并兼顧到這二種拓樸結(jié)構(gòu)的特性。
輸出滿載時,對于降壓Buck變換器,當輸入電壓最大時,電感的紋波最大:
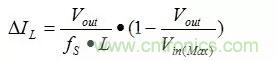
式中:△IL為電感電流的紋波,fs為開關(guān)頻率。
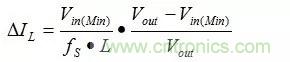
輸出滿載時,對于升壓Boost變換器,當輸入電壓最小時,電感的紋波最大:
因此最大的電感電流紋波由輸入最小電壓和最大電壓共同來決定,這樣在整個電壓范圍內(nèi),電感電流紋波的變化值很大,在選取電感電流紋波系數(shù)時,必須作一些折衷的處理。根據(jù)實際經(jīng)驗,一般可以根據(jù)下面的原則來選取:升壓Boost模式下,輸入電壓最小時,電感的電流紋波系數(shù)最大值取20%~30%;降壓Buck模式下,輸入電壓最大時,電感的電流紋波系數(shù)最大值取100%~150%。
電感的電流紋波系數(shù)為:
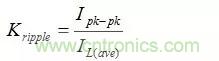
式中:Ipk-pk為電感電流的峰峰值,IL(ave)為電感電流的平均值。
由輸入電壓范圍,輸出電壓和電流,選取工作頻率,就可以計算出電感值。
3、四管同步BuckBoost升降壓變換器PCB的設(shè)計
降壓Buck變換器的電感位于輸出回路,所以輸出回路的電流是連續(xù)的,輸入回路的電流是不連續(xù)的,輸入回路的干擾大,這些環(huán)路產(chǎn)生很大的磁場發(fā)射,因此輸入回路要盡可能的小。輸入回路的地為功率地,要與系統(tǒng)的信號地分開單獨布線,輸出地可以作為干凈的信號地。
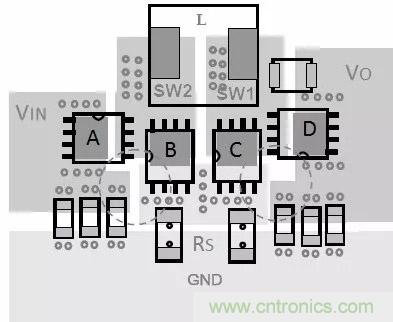
圖6:PCB布局
升壓Boost變換器的電感位于輸入回路,所以輸入回路的電流是連續(xù)的,輸出回路的電流是不連續(xù)的,輸出回路的干擾大,這些環(huán)路產(chǎn)生很大的磁場發(fā)射,因此輸出回路要盡可能的小,輸出回路的地為功率地,要與系統(tǒng)的信號地分開單獨布線,輸入地可以作為干凈的信號地。
兩者的兼顧對PCB設(shè)計要非常的小心,開關(guān)回路中du/dt比較大的節(jié)點SW1和SW2及其回路,要盡可能的小,因為這些環(huán)路產(chǎn)生很大的電場發(fā)射。
電流檢測回路,電流檢測電阻要用KEVIN連接,直接從電流檢測電阻兩端布線,線徑要細,并且平行平線。
4、功率MOSFET選擇
功率MOSFET的功耗主要為導通損耗和開關(guān)損耗,如果功率MOSFET工作于同步整流狀態(tài),主要的功耗為導通損耗、二極管死區(qū)時間及反向恢復(fù)損耗,這些內(nèi)容可以參考以前的文章。
參考文獻
(1) A.I. Pressman. Switching Power Supply Design (second edition). New York: McGraw-HillPublishing Co., 1998.
(2) LTC3780數(shù)據(jù)表
來源:松哥電源,作者:劉松


