
【導(dǎo)讀】CAN一致性測試在于縮小CAN總線節(jié)點(diǎn)間的差異,提高總線抗干擾能力,從而保障設(shè)備CAN網(wǎng)絡(luò)系統(tǒng)的穩(wěn)定。因此,CAN節(jié)點(diǎn)一致性測試就顯得尤為重要,本文將重點(diǎn)對(duì)幾個(gè)測試項(xiàng)進(jìn)行講解。
零部件CAN節(jié)點(diǎn)質(zhì)量的良莠不齊將給CAN總線網(wǎng)絡(luò)帶來較大的安全隱患,某個(gè)節(jié)點(diǎn)的錯(cuò)誤將影響整體總線的正常運(yùn)行,嚴(yán)重時(shí)可能導(dǎo)致整體總線的癱瘓。所以,CAN一致性測試是保障CAN網(wǎng)絡(luò)安全穩(wěn)定的必要手段,其測試內(nèi)容覆蓋了物理層、鏈路層以及應(yīng)用層等測試需求,如下圖1所示。

圖1 CAN一致性測試內(nèi)容(節(jié)選)
輸入閾值測試
閾值測試分為隱性輸入電壓閾值和顯性輸入電壓閾值,節(jié)點(diǎn)Vdiff大于0.9V時(shí)必須識(shí)別顯性,小于0.5V時(shí)必須識(shí)別隱性,在0.5V~0.9V之間,屬于不確定區(qū)域;因此測試目的是為了驗(yàn)證節(jié)點(diǎn)在ISO11898-2中標(biāo)示的輸入電壓閾值范圍內(nèi)均可以通訊,下圖2為ISO11898-2中的相關(guān)標(biāo)準(zhǔn)。
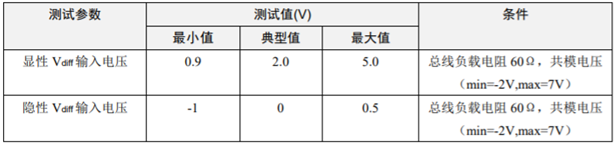
圖2 ISO11898-2 輸入電壓閾值標(biāo)準(zhǔn)
1、測試原理
在圖2 ISO 11898-2 輸入電壓閾值標(biāo)準(zhǔn)所示的總線負(fù)載和共模電壓條件下,按照下圖3隱性輸入電壓測試原理和圖4顯性輸入電壓測試原理的測試原理進(jìn)行隱/顯性輸入電壓閾值測試。
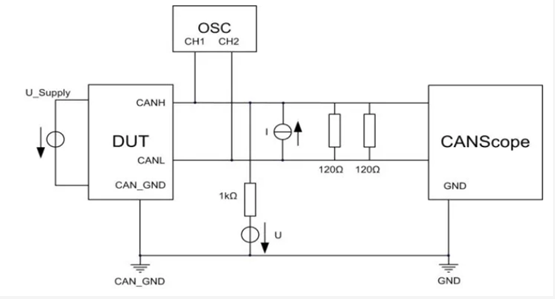
圖3 隱性輸入電壓測試原理
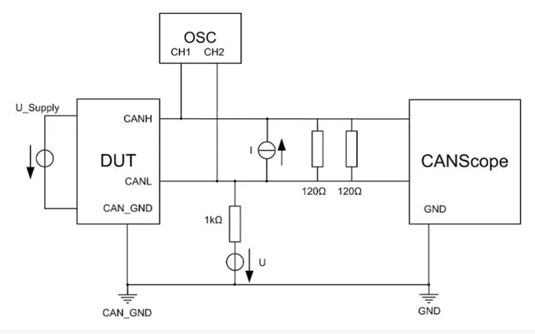
圖4 顯性輸入電壓測試原理
2、判斷依據(jù)
DUT 在 Vdiff≤0.5V(用戶可自定義設(shè)置該范圍) 時(shí),可以正常發(fā)送報(bào)文。至少在 Vdiff>0.9V (用戶可輸入)的情況下,DUT 應(yīng)該停止發(fā)送幀。
輸出電壓測試
CAN總線上面的信號(hào)幅值是接收節(jié)點(diǎn)能正確識(shí)別邏輯信號(hào)的保證。隱性狀態(tài)下,若CAN_diff電壓大于0.9V,則會(huì)使總線呈現(xiàn)持續(xù)顯性狀態(tài)導(dǎo)致通訊錯(cuò)誤;顯性狀態(tài)下,若CAN_diff電壓低于0.5V,說明該節(jié)點(diǎn)驅(qū)動(dòng)能力較弱,會(huì)導(dǎo)致顯性電平判斷錯(cuò)誤,并且在強(qiáng)干擾環(huán)境容易出現(xiàn)電平翻轉(zhuǎn),導(dǎo)致總線故障;如下圖5為輸出電壓幅值引起的錯(cuò)誤。
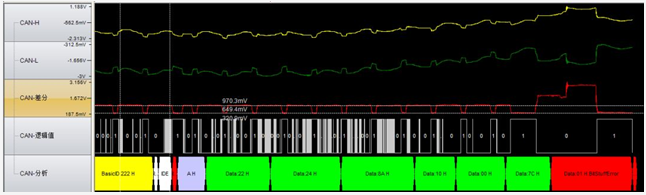
圖5 輸出電壓幅值導(dǎo)致錯(cuò)誤
所以,每個(gè)廠家在產(chǎn)品投入使用前都要測試CAN節(jié)點(diǎn)DUT(被測設(shè)備)的輸出電壓幅值。測試目的就是檢查DUT的CAN_H與CAN_L的隱性/顯性輸出電壓是否遵守ISO11898-2的定義,如下圖6所示。
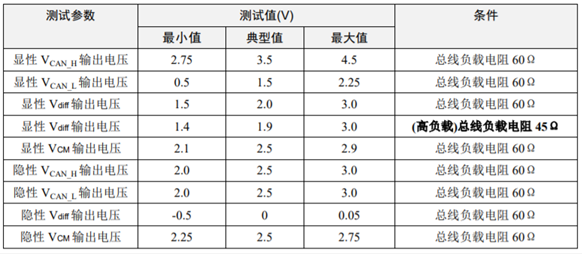
圖6 ISO11898-2 輸出電壓標(biāo)準(zhǔn)
1、測試原理
在圖6 ISO11898-2輸出電壓標(biāo)準(zhǔn)所示的總線負(fù)載條件下,按照?qǐng)D7輸出電壓測試原理的測試原理進(jìn)行輸出電壓測試。
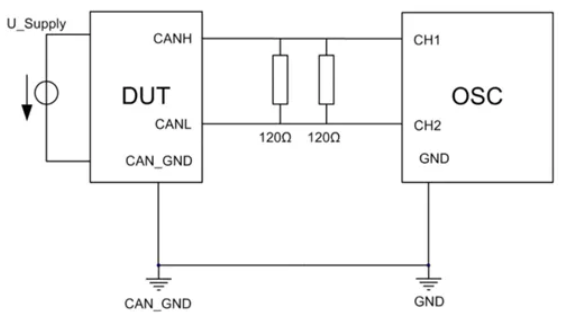
圖7 輸出電壓測試原理圖
2、判斷依據(jù)
如果測試結(jié)果符合圖6 ISO11898-2輸出電壓標(biāo)準(zhǔn)中ISO 11898-2輸出電壓標(biāo)準(zhǔn),則通過測試。
采樣點(diǎn)測試
采樣點(diǎn)是接收節(jié)點(diǎn)判斷信號(hào)邏輯的位置,CAN通訊屬于異步通訊,需要通過不斷的重新同步才能保證接收節(jié)點(diǎn)的采樣準(zhǔn)確;若采樣點(diǎn)太靠前,則因?yàn)榫€纜原因,容易發(fā)生采樣錯(cuò)誤;若采樣點(diǎn)太靠后,則因?yàn)镾JW原因,會(huì)引起接收節(jié)點(diǎn)同步跳轉(zhuǎn)寬度的調(diào)整(調(diào)整自身時(shí)鐘進(jìn)行匹配),調(diào)整不好就容易出現(xiàn)錯(cuò)誤;所以對(duì)CAN節(jié)點(diǎn)進(jìn)行采樣點(diǎn)的測試顯得尤為重要。
1、測試原理
啟動(dòng)CANstress接收?qǐng)?bào)文干擾功能,如圖8CANstress接收?qǐng)?bào)文干擾功能所示。從位時(shí)間的45%位置,每次干擾遞增1%,直至100%;通過統(tǒng)計(jì)記錄CANScope-Pro的錯(cuò)誤報(bào)文,出現(xiàn)錯(cuò)誤報(bào)文的干擾點(diǎn)則等于采樣點(diǎn)。
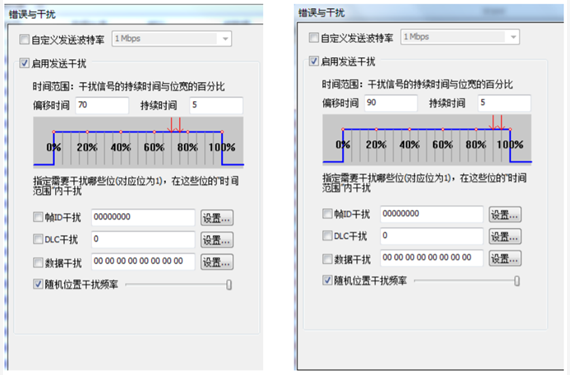
圖8 采樣點(diǎn)測試原理
2、判斷依據(jù)
DUT發(fā)送的CAN報(bào)文信號(hào)的采樣點(diǎn)應(yīng)處于規(guī)范定義的范圍內(nèi):75%≤SP≤83.4%。
位寬容忍度測試
容忍度表示波特率范圍(位時(shí)間范圍),調(diào)大容忍度可以利于接收其它節(jié)點(diǎn)的報(bào)文;采樣點(diǎn)和容忍度是評(píng)價(jià)CAN節(jié)點(diǎn)適應(yīng)性的重要因素。SJW(同步跳轉(zhuǎn)寬度)決定了接收節(jié)點(diǎn)是否能有比較好的兼容性,如果接收節(jié)點(diǎn)SJW對(duì)波特率調(diào)整不好,就會(huì)導(dǎo)致位寬容忍度不足,出現(xiàn)錯(cuò)誤;所以位寬容忍度測試也是保證信號(hào)穩(wěn)定性的重要測試項(xiàng)目之一。
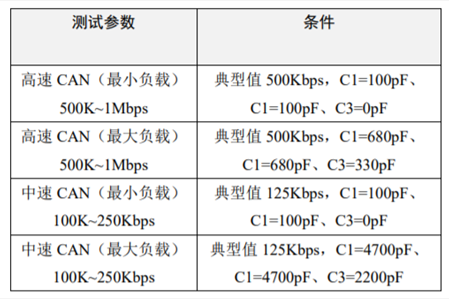
圖9 位寬度容忍測試條件標(biāo)準(zhǔn)
1、測試原理
使用位寬容忍度測試功能,如圖10位寬容忍度測試所示。以DUT波特率為標(biāo)準(zhǔn),配置波特率偏差逐漸增加1%,向CAN網(wǎng)絡(luò)發(fā)送報(bào)文;判斷網(wǎng)絡(luò)有無報(bào)文錯(cuò)誤信息反饋,若有錯(cuò)誤反饋,則結(jié)束測試,并判斷結(jié)果是否在標(biāo)準(zhǔn)區(qū)間內(nèi)。
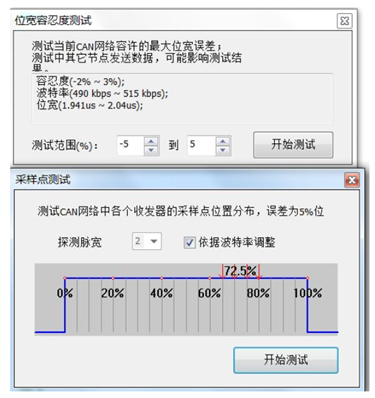
圖10 位寬容忍度測試
2、判斷依據(jù)
位寬容忍度范圍應(yīng)至少符合-4≤SJW≤4%(用戶可設(shè)置該范圍)。
CANDT一致性測試系統(tǒng)
針對(duì)CAN總線節(jié)點(diǎn)一致性測試,許多工程師還停留在使用“示波器+CAN卡”,通過外接電壓源、電流源等外圍設(shè)備,手動(dòng)完成測試,接線復(fù)雜且效率低下。ZLG致遠(yuǎn)電子從汽車電子行業(yè)CAN總線痛點(diǎn)問題出發(fā),研發(fā)出強(qiáng)大功能的CANDT一致性測試系統(tǒng),可自動(dòng)化完成CAN節(jié)點(diǎn)物理層、鏈路層及應(yīng)用層一致性測試,是當(dāng)前CAN總線測試領(lǐng)域唯一能夠進(jìn)行完善的物理層自動(dòng)化測試并導(dǎo)出報(bào)表的儀器設(shè)備!
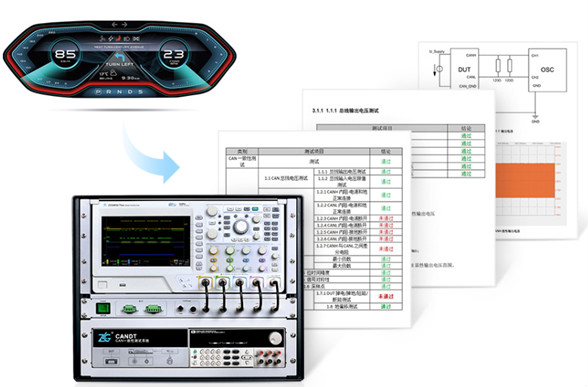
圖11 CANDT一致性測試系統(tǒng)
來源:ZLG致遠(yuǎn)電子
免責(zé)聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請(qǐng)聯(lián)系小編進(jìn)行處理。
推薦閱讀:


