

【導(dǎo)讀】本文基于互補(bǔ)濾波算法,設(shè)計(jì)了兩輪平衡車姿態(tài)角度測(cè)量電路與數(shù)據(jù)處理算法,設(shè)計(jì)了信號(hào)濾波預(yù)處理,利用互補(bǔ)濾波算法融合兩種傳感器數(shù)據(jù),分析了互補(bǔ)濾波算法中關(guān)鍵參數(shù)的計(jì)算方法。并將此方法應(yīng)用于兩輪平衡車角度測(cè)量,進(jìn)行了驗(yàn)證性試驗(yàn),給出了實(shí)驗(yàn)測(cè)試數(shù)據(jù)。
兩輪平衡車具有廣闊的應(yīng)用前景, 使其成為了當(dāng)前研究的熱點(diǎn)。其中,兩輪平衡車的姿態(tài)角度測(cè)量是研究的關(guān)鍵問題之一。姿態(tài)角度測(cè)量是兩輪平衡車運(yùn)行和控制實(shí)現(xiàn)的前提。姿態(tài)角度測(cè)量的精度和速度,將直接影響兩輪平衡車控制算法的穩(wěn)定性和可靠性。隨著慣性測(cè)量元件的微型化與微處理器運(yùn)算能力的提高,兩輪平衡車姿態(tài)測(cè)量普遍采用低成本的慣性測(cè)量組合元件(Inertial Measurement Uint,IMU),結(jié)合微處理器數(shù)據(jù)處理算法實(shí)現(xiàn)高精度的姿態(tài)測(cè)量。IMU 主要由低成本的MEMS 陀螺儀和三軸加速度計(jì)組成。MEMS 陀螺儀有自主性好、功耗低、機(jī)電性能好易集成等優(yōu)點(diǎn)。但是,MEMS 陀螺儀具有溫度漂移特性,其測(cè)量誤差會(huì)隨著時(shí)間的累加而不斷的累積,從而影響測(cè)量精度。加速度計(jì)會(huì)受到平衡車振動(dòng)的影響,混疊額外的振動(dòng)量干擾。所以單一的傳感器測(cè)量難以得到精確的姿態(tài)角度。需采用多傳感器信號(hào)融合的方法,來獲得準(zhǔn)確的姿態(tài)角度量。
多傳感器數(shù)據(jù)的融合方法有神經(jīng)網(wǎng)絡(luò)、小波分析、卡爾曼濾波等姿態(tài)解算算法,但這些方法建立穩(wěn)定可靠的更新方程通常具有較高的階數(shù),且計(jì)算量大,不適合于低運(yùn)算能力系統(tǒng)的實(shí)時(shí)計(jì)算。相比以上方法,互補(bǔ)濾波算法對(duì)處理器運(yùn)算速度要求不高,且簡單可靠。本文基于互補(bǔ)濾波算法,設(shè)計(jì)了兩輪平衡車姿態(tài)角度測(cè)量電路與數(shù)據(jù)處理算法,設(shè)計(jì)了信號(hào)濾波預(yù)處理,利用互補(bǔ)濾波算法融合兩種傳感器數(shù)據(jù),分析了互補(bǔ)濾波算法中關(guān)鍵參數(shù)的計(jì)算方法。并將此方法應(yīng)用于兩輪平衡車角度測(cè)量,進(jìn)行了驗(yàn)證性試驗(yàn),給出了實(shí)驗(yàn)測(cè)試數(shù)據(jù)。
1 姿態(tài)角度測(cè)量原理
沿平衡車3 個(gè)機(jī)體軸即直立時(shí)正前、正右、正上方向定義為x、y、z 三軸參考坐標(biāo)系。所受的3 軸重力加速度分量定義為gx、gy、gz。假設(shè)兩輪平衡車處于靜止或勻速運(yùn) 行的狀態(tài)。得到重力加速度與平衡車姿態(tài)角度的關(guān)系如式1所示:
其中,Cbn為慣性坐標(biāo)系到載體坐標(biāo)系的變換矩陣;θ 為俯仰角;φ為橫滾角;g 為重力加速度; 可以通過測(cè)量重力加速度分量gx、gy、gz,計(jì)算出平衡車俯仰角θ1和橫滾角φ1估計(jì)值
若使用陀螺儀來測(cè)量平衡車姿態(tài)角度,設(shè)陀螺儀測(cè)量載體相對(duì)慣性坐標(biāo)系的x、y、z 三軸旋轉(zhuǎn)角速度分別為ωx、ωy、 ωz。并定義0 時(shí)刻平衡車直立靜止??傻玫礁┭鼋?theta;2和橫滾角φ2估計(jì)值與ωx、ωy之間的關(guān)系如式3 所示:

在實(shí)際應(yīng)用中,由于平衡車機(jī)體運(yùn)行時(shí)存在運(yùn)動(dòng)加速度、測(cè)量噪聲, 以及陀螺儀本身存在漂移等因素的影響, 式(2)、(3)姿態(tài)角度測(cè)量方法失效,為了準(zhǔn)確的獲得姿態(tài)角度??蓪⒁陨系? 種姿態(tài)角度測(cè)量得到的姿態(tài)角度信息相融合。
2 慣性組合測(cè)量電路
該系統(tǒng)中慣性組合測(cè)量電路如圖1 所示, 由加速度計(jì)MMA7361、陀螺儀ENC-03 及放大電路組成。實(shí)現(xiàn)對(duì)加速度計(jì)和陀螺儀測(cè)得信號(hào)進(jìn)行放大。加速度計(jì)和陀螺儀信號(hào)經(jīng)放大,分別由angle 引腳和gyro 引腳輸出后,信號(hào)通過AD 采樣轉(zhuǎn)換為數(shù)字信號(hào),傳遞到微控制器中,再利用互補(bǔ)濾波算法,得到姿態(tài)角度。
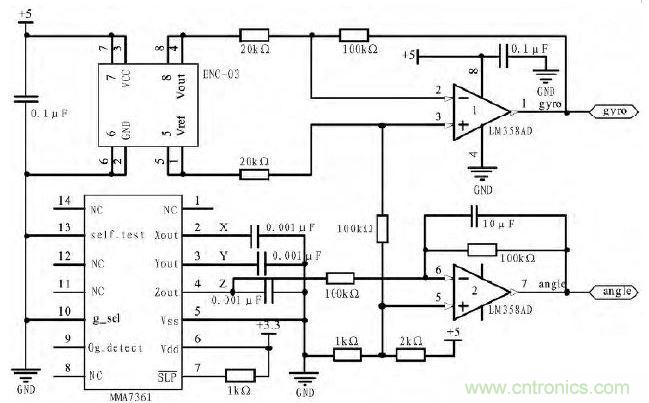
圖1 慣性組合角度測(cè)量電路圖
[page]
3 陀螺儀漂移和加速度傳感器數(shù)據(jù)的預(yù)處理
MEMS 陀螺儀的漂移誤差由常值漂移、隨機(jī)漂移組成,漂移信號(hào)不符合平穩(wěn)、正態(tài)、零均值的時(shí)間序列特征。圖2 為陀螺儀采集到的一段數(shù)據(jù), 對(duì)其積分后得到的俯仰角θ2,表現(xiàn)為誤差不斷累加,逐漸增大。通過式(4)所示算法進(jìn)行均值扣除。
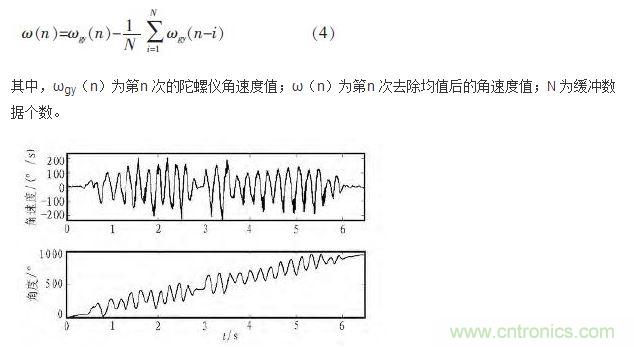
圖2 角速度與角度的曲線
去掉陀螺儀信號(hào)的均值(即常值分量)后,這樣陀螺儀的漂移只含有隨機(jī)漂移,此時(shí)的陀螺儀信號(hào)將作為互補(bǔ)濾波融合的輸入。
加速度計(jì)受機(jī)體振動(dòng)的影響,對(duì)其采用滑動(dòng)均值濾波的方法對(duì)加速度傳感器原始數(shù)據(jù)進(jìn)行處理,濾波原理如式(5)所示:
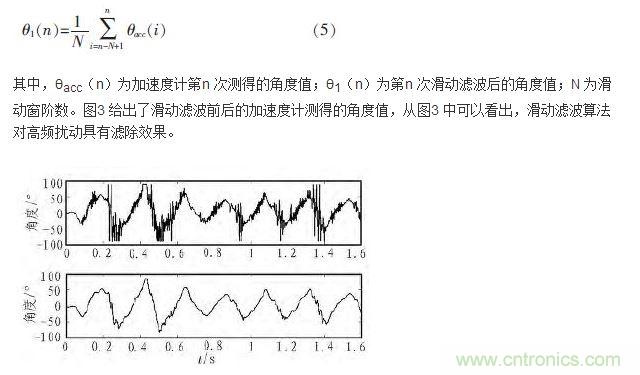
圖3 濾波前后加速度計(jì)數(shù)據(jù)圖
[page]
4 基于互補(bǔ)濾波器的姿態(tài)角度測(cè)量設(shè)計(jì)
陀螺儀動(dòng)態(tài)響應(yīng)特性優(yōu)良,解算姿態(tài)角時(shí),由于陀螺儀低頻漂移的影響,積分后低頻擾動(dòng)會(huì)產(chǎn)生較大誤差;加速度計(jì)解算的姿態(tài)角會(huì)受到平衡車運(yùn)行中機(jī)體高頻振動(dòng)的影響, 輸出角度中攜帶較大分量的高頻干擾。二者在頻域上具有互補(bǔ)特性,采用互補(bǔ)濾波器對(duì)這兩種傳感器數(shù)據(jù)融合,可提高姿態(tài)角度測(cè)量的精度和動(dòng)態(tài)響應(yīng)的性能。
互補(bǔ)濾波器的基本原理圖如圖4 所示。
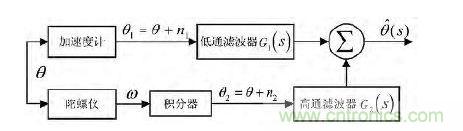
圖4 互補(bǔ)濾波器的原理圖
其中θ 為實(shí)際的角度值,ω 為陀螺儀測(cè)量的角速度, 互補(bǔ)濾波算法后估計(jì)的角度值為互補(bǔ)濾波算法后估計(jì)的角度值, 加速度計(jì)測(cè)量中引入的高頻噪聲n1,陀螺儀測(cè)量中引入的低頻噪聲n2,用低通濾波器G1(s)消除加速度計(jì)中的高頻噪聲n1,用高通濾波器G2(s)消除陀螺儀中的低頻噪聲n2。兩個(gè)濾波器的傳遞函數(shù), 被設(shè)計(jì)為(6)、(7)所示,圖4 結(jié)構(gòu)可化簡為圖5 結(jié)構(gòu)。
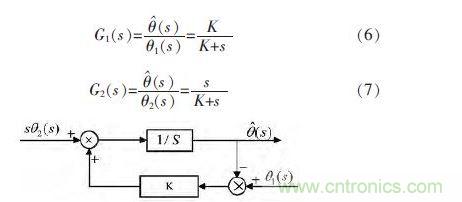
圖5 互補(bǔ)濾波器頻域圖
選用的濾波傳遞函數(shù)需滿足G1(s)+G2(s)=1,由加速度計(jì)得到θ1經(jīng)低通濾波器和陀螺儀得到θ2經(jīng)高通濾波器后的數(shù)據(jù)融合為角度估計(jì)值互補(bǔ)濾波算法后估計(jì)的角度值,適當(dāng)?shù)倪x取權(quán)重因子K 值,可以使系統(tǒng)中高、低通濾波器具有合適的截止率。得到穩(wěn)定的姿態(tài)角度。
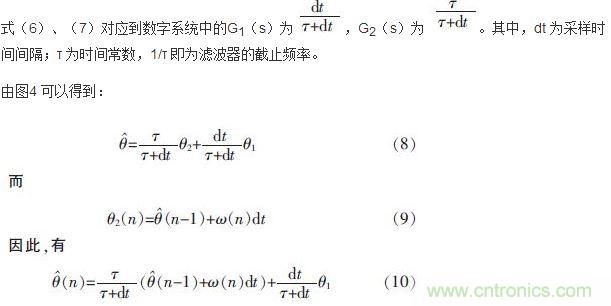
由(8)式可看出,在小于截止頻率的低頻段,加速度計(jì)對(duì)姿態(tài)解算結(jié)果起主要作用;在大于截止頻率的高頻段,陀螺儀對(duì)姿態(tài)解算結(jié)果起主要作用。通過調(diào)整時(shí)間常數(shù),改變?yōu)V波器的截止頻率τ,實(shí)現(xiàn)對(duì)陀螺儀和加速度計(jì)權(quán)重的調(diào)整。
[page]
5 實(shí)驗(yàn)驗(yàn)證
為了驗(yàn)證上述設(shè)計(jì)方案的可行性, 利用直立兩輪小車為實(shí)驗(yàn)驗(yàn)證平臺(tái)。本實(shí)驗(yàn)使用慣性測(cè)量組合元件(IMU)中的慣性傳感器分別選用了ENC-03(測(cè)量范圍:±300(deg/s))陀螺儀,采樣頻率為1.25 kHz 和MMA7361 加速度計(jì)(測(cè)量范圍:±1.5 g)。角度更新頻率為1.25 kHz?;パa(bǔ)濾波器截止頻率為138 Hz。以俯仰角(θ)為例,進(jìn)行了測(cè)試。
5.1 角速度和角度用互補(bǔ)濾波算法融合的分析
把陀螺儀測(cè)得的角速度數(shù)據(jù)和加速度計(jì)測(cè)得的角度數(shù)據(jù)通過(10)式進(jìn)行融合后的波形如圖6 所示,從圖6 中可以看出, 經(jīng)互補(bǔ)濾波算法融合后得到角度消除了陀螺儀的漂移和加速度計(jì)的高頻擾動(dòng),可得以下結(jié)論:
1)單從陀螺儀獲取的角速度積分后得到的角度是不正確的, 要把加速度計(jì)測(cè)得的角度值和陀螺儀測(cè)得角速度積分后的角度進(jìn)行互補(bǔ)濾波算法融合,提高角度精度。
2)經(jīng)互補(bǔ)濾波后陀螺儀的隨機(jī)漂移得到較為明顯的抑制,表現(xiàn)出了此互補(bǔ)濾波算法的有效性和優(yōu)越性。
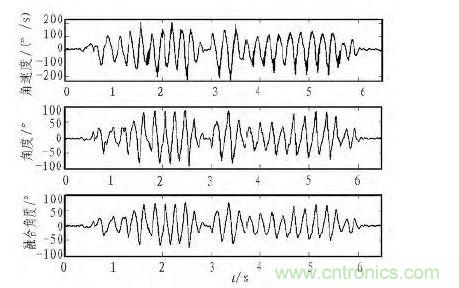
圖6 角速度與角度的融合曲線圖
5.2 經(jīng)互補(bǔ)濾波處理后的角度與沒有經(jīng)處理后的角度比較分析
經(jīng)互補(bǔ)濾波處理后的角度與直接由加速度計(jì)測(cè)得的角度時(shí)域比較,對(duì)其互補(bǔ)濾波處理前后的信號(hào)進(jìn)行FFT 變換其頻譜圖如圖7 所示, 通過互補(bǔ)濾波算法可以降低隨機(jī)噪聲的干擾,可以使測(cè)得角度的波形更加的平滑。
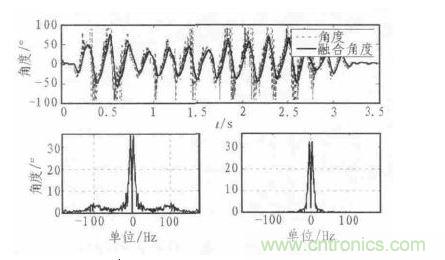
圖7 融合前后角度比較圖
6 結(jié)論
文中分析了兩輪平衡車姿態(tài)角度解算時(shí)陀螺儀漂移和加速度計(jì)高頻擾動(dòng)的影響,針對(duì)陀螺儀漂移和加速度計(jì)高頻擾動(dòng)采用互補(bǔ)濾波融合加速度計(jì)和陀螺儀信號(hào)?;パa(bǔ)濾波能有效消除陀螺儀的漂移,抑制加速度計(jì)的高頻擾動(dòng),減少輸出姿態(tài)角的動(dòng)態(tài)誤差,提高了角度測(cè)量精度,能夠滿足兩輪平衡車的姿態(tài)控制需要。實(shí)驗(yàn)結(jié)果表明了該方法的有效性,可推廣應(yīng)用于車載導(dǎo)航、兩輪平衡車、微小型機(jī)器人的姿態(tài)角度測(cè)量系統(tǒng)。


