
【導(dǎo)讀】特斯拉在五月份發(fā)生的自動(dòng)駕駛事故,和最近在Defcon上演示的如何干擾傳感器,都充分說明了傳感器在自動(dòng)駕駛中的重要性:環(huán)境感知是自動(dòng)駕駛實(shí)現(xiàn)的基礎(chǔ),如果不能正確地感知周圍環(huán)境,那么接下來的認(rèn)知、決策與控制,都是空中樓臺。
從傳感器技術(shù)發(fā)展本身來說,要在接下來十年里保證自動(dòng)駕駛車安全地上路,硬件性能與背后的軟件算法,以及不同傳感器之間的數(shù)據(jù)融合,都是需要提升的地方。
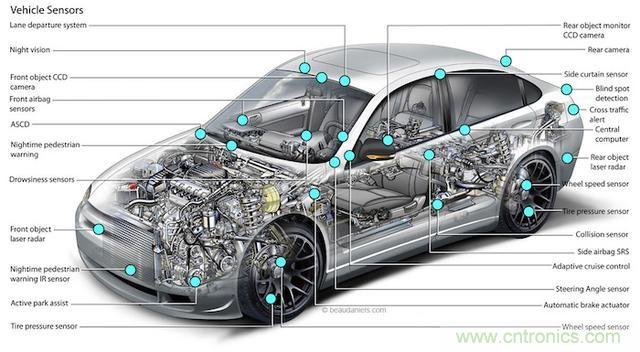
△車輛上的各式各樣傳感器
傳感器在自動(dòng)駕駛的重要性無需贅言。
特斯拉的Autopilot系統(tǒng)通過攝像頭、毫米波雷達(dá)與超聲波雷達(dá)的融合數(shù)據(jù)來控制車輛在高速路車道行駛、變道以及根據(jù)交通情況調(diào)整車速。
谷歌的全自動(dòng)駕駛測試車用的是價(jià)格昂貴、結(jié)構(gòu)復(fù)雜的遠(yuǎn)距傳感系統(tǒng)LiDAR(激光雷達(dá))。
豐田透露過他們的高速道路自動(dòng)駕駛汽車上有12個(gè)傳感器:1個(gè)藏在內(nèi)后視鏡里的前攝像頭,5個(gè)測量周圍車輛速度的雷達(dá),和6個(gè)探測周圍目標(biāo)位置的激光雷達(dá)5。
盡管也有一些企業(yè)另辟蹊徑,希望通過V2X技術(shù)來完成環(huán)境感知的工作,但是V2X嚴(yán)重依賴于基礎(chǔ)設(shè)施,而傳感器則不受這個(gè)限制。
激光雷達(dá)
LiDAR系統(tǒng)使用的是旋轉(zhuǎn)激光束。寶馬、谷歌、日產(chǎn)和蘋果的無人駕駛試驗(yàn)車用的就是這項(xiàng)技術(shù)。但要想在量產(chǎn)車上應(yīng)用,價(jià)格必須大幅下降。業(yè)內(nèi)普遍認(rèn)為,再過幾年這個(gè)目標(biāo)就能實(shí)現(xiàn)。
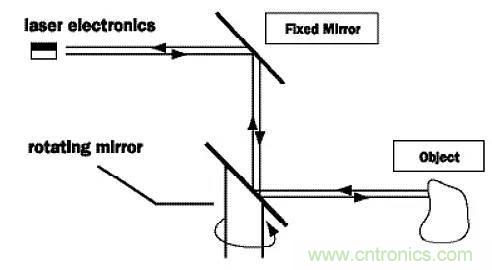
△激光雷達(dá)工作原理(圖片來自Velodyne)
激光雷達(dá)的工作原理是通過發(fā)射和接收激光束來實(shí)現(xiàn)的。在其內(nèi)部,每一組組件都包含一個(gè)發(fā)射單元與接收單元。上圖的Velodyne使用了旋轉(zhuǎn)鏡面的設(shè)計(jì)。
這套發(fā)射/接收組件和旋轉(zhuǎn)鏡面結(jié)合在一起,能掃描至少一個(gè)平面。鏡面不只反射二極管發(fā)出去的光,而且也能把反射回來的光再反射給接收器。通過旋轉(zhuǎn)鏡面,能夠?qū)崿F(xiàn)90到180度的視角,并且大大降低系統(tǒng)設(shè)計(jì)和制造的復(fù)雜度,因?yàn)殓R面是這里面唯一的運(yùn)動(dòng)機(jī)構(gòu)。
脈沖光以前被用于探測距離。探測距離的原理是基于光返回的時(shí)間,激光二極管發(fā)出脈沖光,脈沖光照射到目標(biāo)物后反射一部分光回來,在二極管附近安裝一個(gè)光子探測器,它可以探測出返回來的信號,通過計(jì)算發(fā)射和探測的時(shí)間差就可以計(jì)算出目標(biāo)物的距離。脈沖距離測量系統(tǒng)一旦被激活就能收集到大量的點(diǎn)云。
如果點(diǎn)云中有目標(biāo)物,目標(biāo)物就會(huì)在點(diǎn)云中呈現(xiàn)出一個(gè)陰影。通過這個(gè)陰影可以測量出目標(biāo)物的距離和大小。通過點(diǎn)云可以生成周圍環(huán)境的3D圖像。點(diǎn)云密度越高,圖像越清晰。
通過激光雷達(dá)來生成周圍環(huán)境的3D圖像有幾種不同的方式。
一種實(shí)現(xiàn)方法是讓發(fā)射/接收組件上下移動(dòng)同時(shí)讓鏡面旋轉(zhuǎn),有時(shí)也叫這種方法為“眨眼點(diǎn)頭”。這種方法能生成高度方向上的點(diǎn)云,但是減少了方位數(shù)據(jù)點(diǎn)(azimuthdatapoints),因此點(diǎn)云密度會(huì)降低,分辨率也不夠高。
另一種方法叫“光掃描激光雷達(dá)”(flashLiDAR)。這種方法是使用2D焦平面陣列(FocalPlaneArray,F(xiàn)PA)捕捉像素距離信息,同時(shí)發(fā)出激光來照射大塊面積。這類傳感器結(jié)構(gòu)復(fù)雜,制造困難,因此還沒有廣泛的商業(yè)應(yīng)用。但是它屬于固態(tài)傳感器,沒有運(yùn)動(dòng)部件,因此將來有可能替代現(xiàn)有的機(jī)械式傳感器。
目前雖然有不同的LiDAR結(jié)構(gòu)可以產(chǎn)生很多形式的3D點(diǎn)云系統(tǒng),但是還沒有一種系統(tǒng)能達(dá)到自動(dòng)駕駛導(dǎo)航的應(yīng)用要求。比如說,有很多系統(tǒng)能生成精致的圖像,但是產(chǎn)生一幅圖像需要花好幾分鐘。這種系統(tǒng)就不適合移動(dòng)傳感類的應(yīng)用。還有一些光掃描系統(tǒng)的刷新率很高,但視角和探測距離又太小。另外還有一些單光束(singlebeam)系統(tǒng)能提供有用的信息,但是如果目標(biāo)太小或者超出了視角就探測不到了。
要想讓LiDAR傳感器的使用最大化,必須要能夠看到周圍所有的地方,也就是所說的需要實(shí)現(xiàn)360度視角;最終給用戶輸出的數(shù)據(jù)要有實(shí)時(shí)性,因此必須使數(shù)據(jù)收集和畫面生成之間的時(shí)間延遲最小化。駕駛員的反應(yīng)時(shí)間一般是十分之幾秒,如果我們要實(shí)現(xiàn)自動(dòng)駕駛導(dǎo)航,那么導(dǎo)航電腦的刷新率至少要達(dá)到十分之一秒。視角也不能只看水平方向,還需要有高度方向的視角,否則車就會(huì)掉到路上的坑里。垂向視角應(yīng)該向下盡可能的靠近車輛,以便讓自動(dòng)駕駛適應(yīng)路面的顛簸和陡坡。
目前,業(yè)內(nèi)有數(shù)家生產(chǎn)制造激光雷達(dá)的企業(yè),他們的產(chǎn)品也有著各自的特色。
Velodyne擁有高精度激光雷達(dá)技術(shù)(HDL),據(jù)稱其HDL傳感器能夠提供360度水平視角,26.5度的垂直視角,15Hz的刷新率,并可以每秒生成一百萬像素的點(diǎn)云。今年Velodyne推出了小型化的32線傳感器,可以實(shí)現(xiàn)200米的探測距離,垂直視角28°。

△Velodyne固態(tài)32線UltraPack激光雷達(dá)
Leddar公司同樣也有具備360°探測能力的激光雷達(dá)產(chǎn)品。并且,因?yàn)橥瑫r(shí)提供ADAS解決方案,Leddar同樣也提供傳感器融合技術(shù),把不同傳感器的數(shù)據(jù)組合在一起,從而形成車輛周邊環(huán)境的整體圖像。
固態(tài)LiDAR——替代攝像頭/雷達(dá)或者作為它們的補(bǔ)充,可集成到ADAS以及無人駕駛功能中;
為高級別自動(dòng)駕駛提供高密度點(diǎn)云的LiDAR;
可以支持光掃描或者光束測量的LiDAR(例如MEMS鏡面);
Ledaar的激光雷達(dá)探測距離可達(dá)250m,水平視角可達(dá)到140度,每秒可生成48萬像素的點(diǎn)云,水平和垂直方向的分辨率可達(dá)0.25度。
視覺圖像傳感器
現(xiàn)在一個(gè)很廣泛的應(yīng)用是將2D激光雷達(dá)與視覺傳感器相結(jié)合,不過相比于激光雷達(dá),視覺傳感器低成本的特性,也讓其成為了在自動(dòng)駕駛解決方案中不可或缺的存在。
通過視覺傳感器的圖像識別技術(shù)對周邊環(huán)境進(jìn)行感知,對于自動(dòng)駕駛而言,除了知道在什么位置存在什么物體/行人之外,進(jìn)而像車輛發(fā)出減速剎車等指令來避免事故這一功能之外,是以圖像識別為基礎(chǔ),能夠理解當(dāng)前的駕駛場景,并學(xué)會(huì)處理突發(fā)事件。
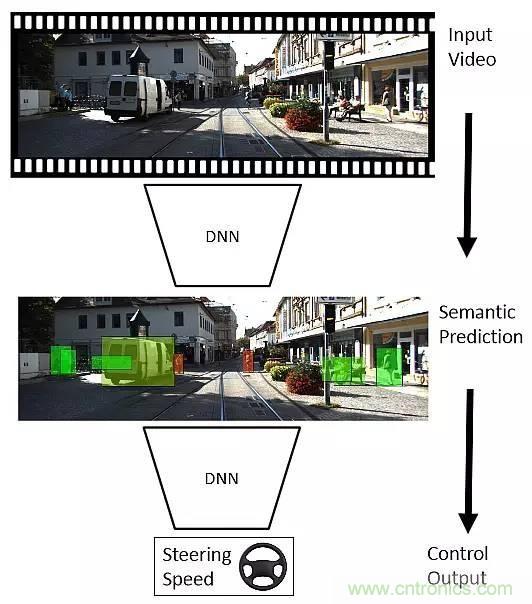
△視覺傳感器工作流程
如果說激光雷達(dá)的難度在于如何讓其性能能夠滿足自動(dòng)駕駛導(dǎo)航的需求,那么攝像頭的難度則在于從感知拔高到認(rèn)知的這一過程。
以人眼來進(jìn)行類比的話,人類駕駛員在看到行人或車輛之后,會(huì)基于看到的景象對行人或車輛的下一步行動(dòng)有個(gè)預(yù)判,并根據(jù)預(yù)判來控制車輛。自動(dòng)駕駛車同樣需要這個(gè)「預(yù)判」的過程,而攝像頭就起到觀察的作用。自動(dòng)駕駛汽車必須能夠?qū)噧?nèi)人員、車外行人、車附近人們的行為進(jìn)行觀察、理解、建模、分析和預(yù)測。
這個(gè)從觀察到預(yù)測的過程同樣適用于道路上的其他車輛,不過,如何獲取駕駛場景的整體含義,如何處理突發(fā)的場景和目標(biāo),如何針對特定目標(biāo)(行人或車輛)準(zhǔn)確進(jìn)行短時(shí)或長時(shí)的行為分析,以及如何對周邊的人或車輛進(jìn)行行為預(yù)測并決策,這些技術(shù)都有待于進(jìn)一步的深入研究。
車云小結(jié)
傳感器和算法的研究和相應(yīng)的工程技術(shù)正在快速發(fā)展,它們可以使自動(dòng)駕駛汽車預(yù)測人和車輛的不確定行為,并快速響應(yīng)以避免車輛、財(cái)產(chǎn)的損失,更重要的是能夠保護(hù)珍貴的生命。
當(dāng)然,自動(dòng)駕駛的傳感器并不只是激光雷達(dá)與攝像頭兩類,毫米波雷達(dá)與超聲波雷達(dá),以及目前還并沒有為自動(dòng)駕駛所用的聲音傳感器,下篇文章將繼續(xù)介紹。

