

【導讀】傳統(tǒng)毫米波雷達不具備測高能力,難以判斷前方靜止物體是在地面還是在空中,無法細化剎車場景,如井蓋、減速帶等無需剎車的地面低小障礙物;交通標識牌、龍門架、立交橋等無需剎車的空中障礙物;以及需要剎車的車輛、三角錐桶等路面上較大障礙物。為此,為避免誤剎車頻發(fā),AEB算法便決定降低毫米波雷達的置信度權(quán)重,以視覺感知結(jié)果為主。
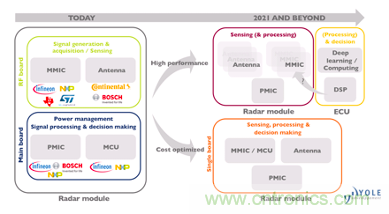
yole發(fā)布的《2020年雷達產(chǎn)業(yè)態(tài)勢報告:廠商、應用與技術(shù)趨勢》指出,到2025年,汽車市場預期將以11%的CAGR增長,因為汽車應用雷達已成為標準設(shè)備,在測試場景變得更嚴苛之后,有兩大趨勢正在涌現(xiàn):第一是向能更準確描述車輛前后方場景的成像雷達前進;第二是增加車輛各處傳感器的數(shù)量,通過協(xié)調(diào)來改善場景知覺。近年來出現(xiàn)的4D成像毫米波雷達恰恰反映了這些趨勢。
1、4D毫米波雷達補短板
傳統(tǒng)毫米波雷達不具備測高能力,難以判斷前方靜止物體是在地面還是在空中,無法細化剎車場景,如井蓋、減速帶等無需剎車的地面低小障礙物;交通標識牌、龍門架、立交橋等無需剎車的空中障礙物;以及需要剎車的車輛、三角錐桶等路面上較大障礙物。為此,為避免誤剎車頻發(fā),AEB算法便決定降低毫米波雷達的置信度權(quán)重,以視覺感知結(jié)果為主。然而,視覺感知的挑戰(zhàn)在于,目標障礙物必須經(jīng)過提前訓練,而模型庫又不可能窮舉所有類型,所以很多靜態(tài)障礙物成了“漏網(wǎng)之魚”,此外即使有模型庫,另一個挑戰(zhàn)在于神經(jīng)網(wǎng)絡(luò)能否正確識別出前方障礙物。因此,便經(jīng)常出現(xiàn)明明前方有障礙物、自動駕駛汽車卻依然撞上去的結(jié)果。
4D毫米波雷達又稱為成像雷達,“4D”是指在原有距離、方位、速度的基礎(chǔ)上增加了對目標的高度維數(shù)據(jù)解析,能夠?qū)崿F(xiàn)“3D+速度”四個維度的信息感知。
而“成像”概念是指其具備超高的分辨率,可以有效解析目標的輪廓、類別、行為。這意味著4D毫米波雷達系統(tǒng)可以適應更多復雜路況,包括識別較小的物體,被遮擋的部分物體以及靜止物體和橫向移動障礙物的檢測等。
升級為4D毫米波雷達,AEB算法便可更多考慮毫米波雷達的感知結(jié)果,從而以更高概率識別路面上的靜態(tài)障礙物,結(jié)合其高分辨率帶來的優(yōu)勢,可以更有效地解析目標的輪廓、類別、行為,進而能知道在什么情況下必須剎車(避免漏剎)。
2、軟硬兼施實現(xiàn)量產(chǎn)
在毫米波雷達芯片圈內(nèi),頭部廠商都認為實現(xiàn)4D成像的關(guān)鍵在于多天線,技術(shù)門檻并不高。多年來,市場一直由英飛凌和恩智浦把持。2020年初,英飛凌宣布與首創(chuàng)車載4D高清點云成像雷達的美國傲酷(Oculi)合作,進入汽車級成像雷達市場,但至今還沒有看到產(chǎn)品。
毫米波雷達市場格局及趨勢
為了搶占市場,德州儀器(TI)2016年底推出基于CMOS工藝的高集成度77GHz毫米波雷達傳感器AWR1642系列,是為適用中短距場景的集成DSP和MCU的單芯片產(chǎn)品,在長距毫米波雷達芯片組市場仍甘拜下風。
既然無法與毫米波雷達芯片巨頭正面較量,只能走曲線救國的道路。何以見得?上面提到的傲酷首創(chuàng)了車載4D成像雷達,活學活用的就是德州儀器的芯片。
德州儀器4D成像毫米波雷達概念于2018年底拋出,推出了基于AWR2243 FMCW(調(diào)頻連續(xù)波)單芯片收發(fā)器的4片級聯(lián)4D毫米波雷達全套設(shè)計方案,最難搞的天線也融入其中,內(nèi)嵌四元件串饋貼片(4-element series-fed patch)天線。
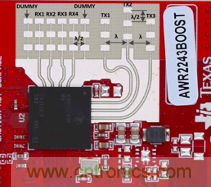
AWR2243的PCB天線
AWR2243 FMCW收發(fā)器基于TI的低功耗45nm RFCMOS工藝,以單片實現(xiàn)具有內(nèi)置PLL和A2D轉(zhuǎn)換器的3Tx和4Rx系統(tǒng)。簡單的編程模型更改可以實現(xiàn)多種傳感器實現(xiàn)方式(短、中、長),并可動態(tài)重新配置以啟用多模傳感器。AWR2243收發(fā)器作為完整的平臺解決方案提供,包括參考硬件設(shè)計、軟件驅(qū)動程序、示例配置、API指南和用戶文檔。

垂直裝配的EVM樣機
算法包括MATLAB MIMO和波束形成兩種選擇,交鑰匙工程讓4D成像毫米波雷達技術(shù)門檻為之大降。也讓傲酷們得以率先嘗鮮。
AWR2243是一款76GHz至81GHz汽車類第二代高性能MMIC。目前已成為中國乃至全球4D成像毫米波雷達主要采用的級聯(lián)方案,有追求低成本的2片級聯(lián),也有追求高性能的4片級聯(lián)。
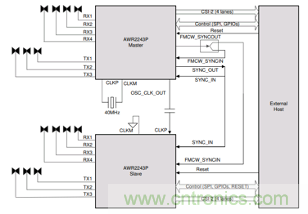
2片級聯(lián)成像雷達
2021年3月,傲酷用TI芯片實現(xiàn)了超高角分辨率4D成像前向雷達Eagle,是一個軟硬兼施方式做出的產(chǎn)品。Eagle 77GHz成像雷達使用的是市場流行的TI毫米波雷達芯片,傲酷獨有的軟件使毫米波雷達實現(xiàn)了4D高清成像,探測距離在350米以上。
Eagle在雙芯片平臺上實現(xiàn)了寬視野范圍內(nèi)的高角度分辨率和仰角信息,通過專有的AI算法驅(qū)動的虛擬孔徑成像軟件,角度分辨率提高了50-100倍;多虛擬天線方式徹底解決了困擾車載毫米波雷達界幾十年來只能用增加實體天線數(shù)量提高角分辨率的難題,用軟件重新定義了雷達。同時4D成像雷達產(chǎn)品的BOM成本和普通毫米波雷達差不多,但性能卻實現(xiàn)了碾壓。
Eagle可在120°水平/30°垂直寬視場中提供0.5°水平x 1°縱向角分辨率。其遠程和高角度分辨率使其能夠用于各種自動駕駛應用,包括高分辨率雷達測繪和定位、自主路徑規(guī)劃和避障、目標檢測和跟蹤、室內(nèi)導航、虛擬圍欄等。
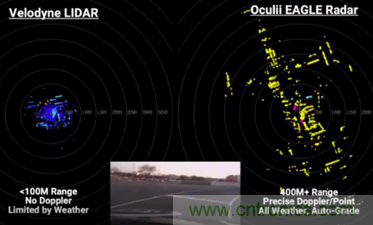
傳統(tǒng)商用雷達與傲酷雷達對比
傳統(tǒng)雷達波形是單頻、重復、非自適應的,產(chǎn)生多種波形的唯一方法是增加接收天線數(shù)量。虛擬孔徑成像波形是自適應的相位調(diào)制。每根接收天線在不同時間產(chǎn)生不同的相位響應,然后對數(shù)據(jù)進行插值和外推,創(chuàng)造一個“虛擬孔徑”。使用人工智能從環(huán)境中學習和適應的智能軟件可以伴隨成倍增長的數(shù)據(jù)而不斷改進。
傳統(tǒng)雷達波形與虛擬孔徑成像波形
傳統(tǒng)雷達的分辨率取決于天線數(shù)量。這意味著性能是固定的,需要更多的硬件——更多天線、更多處理、更大尺寸和額外成本——來實現(xiàn)更高的角分辨率。額外的實體天線可以線性增加性能,但成本、尺寸和功耗呈指數(shù)增長,限制了商用雷達中可使用的天線數(shù)量。
Eagle用低成本、低功耗的雙芯片(6T8R)硬件平臺可提供傳統(tǒng)雷達用8芯片級聯(lián)(24T32R)才能達到的角分辨率。通過軟件計算和數(shù)據(jù)實現(xiàn)更高的角分辨率,可以遵循摩爾定律的指數(shù)級增長,實現(xiàn)更長的探測距離和低成本。
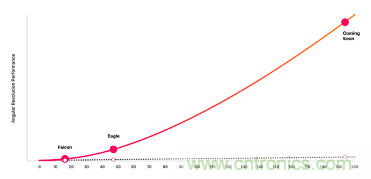
“基陣”物理MIMO接收機數(shù)量與角分辨性能趨勢
據(jù)介紹,傲酷的高分辨率點云數(shù)據(jù)可以在原始數(shù)據(jù)層面與其他傳感器,如攝像頭、激光雷達等融合,實現(xiàn)深度傳感器融合能力,保證全天候條件下運行,得到最好的跟蹤結(jié)果。
3、狙擊TI 4D雷達處理器
雖然毫米波雷達芯片老大英飛凌還沒有動靜,恩智浦卻早已坐不住了。6月初,恩智浦宣布推出基于臺積電16nm工藝量產(chǎn)兩款車用芯片——汽車網(wǎng)絡(luò)處理器S32G2和雷達信號處理器S32R2949(雷達傳感器芯片組),并表示為將來采用臺積電5nm工藝鋪路。
S32R294芯片
S32R294可以處理4D點云雷達信號,將為主機廠提供擴展性解決方案所需的效能,包括先進轉(zhuǎn)角雷達、長距離前置雷達和先進多模式使用場景,如同步盲點偵測、變換車道輔助和仰角感測等。
S32R294應用級聯(lián)框圖
S32R294與恩智浦上一代芯片S32R274尺寸一致,芯片外觀尺寸是7.5mm×7.5mm,但其性能提高了一倍。S32R294有兩個Power Architecture e200z7 32-bit內(nèi)核,用于雷達信號的后處理和任務調(diào)度,如超分辨算法、信號聚類、目標追蹤等。它還有一對鎖步z4內(nèi)核,用于運行與功能安全相關(guān)的軟件,如AUTOSAR OS、輸出決策指令等。
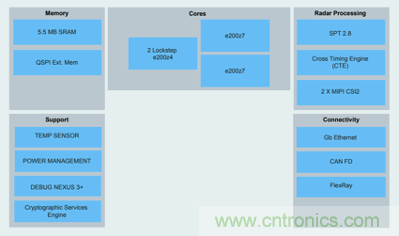
S32R294框圖
S32R294內(nèi)置雷達信號加速單元,簡稱SPT2.8,對雷達中頻信號的FFT、求模、峰值檢測、直方圖統(tǒng)計等最耗資源的運算進行硬件加速,是專門針對FMCW雷達的信號處理加速單元。
S32R294與上一代處理器的軟件復用率高達80%。得益于16nm工藝,S32R294的功耗不到上一代55nm工藝處理器的一半,在0.9W左右,有助于客戶開發(fā)高性、能低功耗的毫米波雷達產(chǎn)品。
S32R294處理器已獲得ASIL D ISO26262認證。其專門的硬件加密引擎CSE(Cyptographic Services Engine)支持安全啟動(security boot)等高階加密算法。
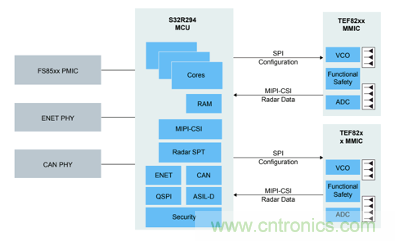
S32R294的多種配置支持從入門到高端的全系應用開發(fā),如一發(fā)三收、三發(fā)四收、六發(fā)八收等中頻信號處理。中頻信號處理主要是獲得距離、速度和角度信息,其中基礎(chǔ)距離、速度、角度信息由SPT2.8計算求得,后續(xù)數(shù)據(jù)交由Z7和Z4核實現(xiàn)超分辨算法、信號聚類、目標追蹤、決策等功能。目標級數(shù)據(jù)和決策指令通過CAN FD接口輸出到后端車身控制單元或ADAS域控制器。
六發(fā)八收毫米波雷達最多支持2片芯片級聯(lián),其兩路MMIC是恩智浦TF82系列微波集成電路,通過LO相連實現(xiàn)芯片間同步。MMIC芯片的波形是由MCU通過SPI配置通道控制其波形發(fā)射。接收鏈路接收到的中頻信號也是通過MIPI-CSI接口傳輸回MCU做后續(xù)處理。
這表明恩智浦的雷達芯片非常靈活,可以處理從低端到高端的所有應用。雷達接收的通道數(shù)越多,其視場角就越寬,可以實現(xiàn)橫向防撞預警、代客泊車、4D點云成像等高級輔助駕駛功能。

S32R294目標雷達應用
與德州儀器如出一轍,恩智浦還為S32R29提供了開發(fā)汽車雷達應用的MCU評估板。評估板可以訪問以太網(wǎng)和CAN、MIPI-CSI2等通信接口,與雷達收發(fā)器和GPIO接頭連接訪問其他MCU功能。

S32R29 EVB汽車雷達應用評估板
S32R29 EVB還有助于軟件開發(fā)和評估信號處理工具包,提高雷達數(shù)學速度、S32R29 MCU的功能安全或信息安全。這樣做無非是想幫助雷達廠商采用這款芯片做出產(chǎn)品,盡快實現(xiàn)量產(chǎn)。
4、做貼合國情的4D成像雷達
中國路況復雜程度盡人皆知,要不特斯拉也不會水土不服。為此,不做整車的華為也是不遺余力在研發(fā)各種感知技術(shù),高分辨4D成像雷達便是其中之一。
華為認為,近年來自動駕駛事故中感知不足是重要原因之一是不能有效識別靜止車輛或事故車輛,對隔離樁或護欄判斷不準,這些都會導致嚴重事故。高分辨4D成像雷達可以檢測目標的4個維度,包括速度、距離、水平角度和垂直角度,解決傳統(tǒng)雷達水平分辨能力不足、不支持垂直分辨、導致看不清和看不準的問題。4D成像雷達滿足全目標、全覆蓋和多工況感知要求,逐步接近了理想傳感器目標,將與攝像頭、激光雷達形成有效融合和冗余。
在大幅提升分辨率、目標檢測的置信度和檢測范圍(如距離和視場角(FOV))的同時,4D成像雷達進化出像激光雷達一樣的高密度點云,實現(xiàn)豐富的感知增強應用,如環(huán)境刻畫、雷達構(gòu)圖、定位等,還可通過多雷達點云級融合,更好地實現(xiàn)車周360°檢測。
華為高分辨率4D成像雷達
華為高分辨率4D成像雷達能力的提升體現(xiàn)在3個方面:
大陣列高分辨率。12個發(fā)射通道,24個接收通道,比常規(guī)毫米波3發(fā)4收天線配置提升了24倍,比典型成像雷達多50%接收通道。據(jù)說這是短期可量產(chǎn)最多天線配置的成像雷達。
大視場無模糊。水平視場從90°提升到120°,垂直視場從18°提升到30°(與傲酷相當),縱向探測距離從200米提升到300米以上。
4D高密度點云。4D點云包括速度、距離、水平角度和垂直角度,相比激光雷達點云多了一個速度維度對目標進行解析。
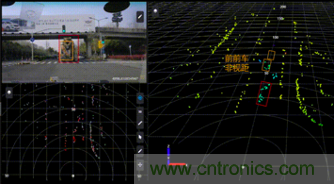
在實測中,華為高分辨率4D成像雷達展示了一些特色:
在前方擁堵時,實現(xiàn)130km/h下舒適性剎停;
錐桶探測距離達110米,可分辨護欄旁的靜止車輛;
被遮擋或部分遮擋目標感知,可以看到前車、前前車和前前前車,甚至可以看到前前車的大致底盤輪廓,通過對前前車感知,可以提前預判前車急減速等動作,減少連環(huán)追尾風險。
非視距前前車感知
華為智能汽車解決方案BU Marketing與銷售服務部總裁遲林春在介紹智能駕駛業(yè)務進展情況時表示:“華為的天線已經(jīng)做到128發(fā)128收,非常先進,華為的毫米波雷達是在通信技術(shù)的基礎(chǔ)上開發(fā)出來的。”
5、性能之爭變本加厲
TI的AWR2243是3發(fā)4收,可以4片級聯(lián),實現(xiàn)12發(fā)16收;采用TI AWR2243的傲酷Eagle是雙芯片6發(fā)8收,由于有軟件幫助,可以實現(xiàn)24發(fā)32收;恩智浦S32R294最多支持6發(fā)8收,支持2片級聯(lián),就是12發(fā)16收(與TI相當);華為目前是12發(fā)24收??梢钥闯隼走_廠商如果有自己獨到的軟件技術(shù),可以將芯片(硬件)的性能再度提升。
還有一家國內(nèi)毫米波雷達廠商使用恩智浦2020年12月推出的TEF82xx MMIC做出了4D成像雷達,據(jù)說比國外某廠商的產(chǎn)品性能提高兩倍,比國內(nèi)2022H2 SOP的產(chǎn)品性能提升一倍,且早18個月量產(chǎn)。其技術(shù)細節(jié)尚未拿到,之后再予以介紹。
免責聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請電話或者郵箱聯(lián)系小編進行侵刪。


