
【導(dǎo)讀】方波驅(qū)動(dòng)的無(wú)刷直流電機(jī)由于力矩大,運(yùn)行可靠,在電動(dòng)車控制器中廣泛應(yīng)用,方波驅(qū)動(dòng)最大的缺點(diǎn)在于換相時(shí)的電流突變引起的轉(zhuǎn)矩脈動(dòng),導(dǎo)致噪聲較大,但好的控制策略可以大大改善換相噪聲。電動(dòng)車控制器設(shè)計(jì)的難點(diǎn)在于電流控制,本文就電動(dòng)車控制器設(shè)計(jì)的一些關(guān)鍵地方加以描述。
1.概述
電動(dòng)自行車上使用的電機(jī)普遍采用永磁直流電機(jī)。所謂永磁電機(jī),是指電機(jī)線圈采用永磁體激磁,不采用線圈激磁的方式。這樣就省去了激磁線圈工作時(shí)消耗的電能,提高了電機(jī)機(jī)電轉(zhuǎn)換效率,這對(duì)使用車載有限能源的電動(dòng)車來(lái)講,可以降低行駛電流,延長(zhǎng)續(xù)行里程。
永磁直流電機(jī)按照電機(jī)的通電形式來(lái)分,可分為有刷電機(jī)和無(wú)刷電機(jī)兩大類,有刷電機(jī)由于采用機(jī)械換相裝置導(dǎo)致可靠性和壽命降低,因此逐漸退出電動(dòng)車市場(chǎng)。
無(wú)刷電機(jī)又可分為有傳感器和無(wú)傳感器兩類,對(duì)于無(wú)位置傳感器的無(wú)刷電機(jī),必須要先將車用腳蹬起來(lái),等電機(jī)具有一定的旋轉(zhuǎn)速度以后,控制器才能識(shí)別到無(wú)刷電機(jī)的相位,然后控制器才能對(duì)電機(jī)供電。由于無(wú)位置傳感器無(wú)刷電機(jī)不能實(shí)現(xiàn)零速度啟動(dòng),所以現(xiàn)在生產(chǎn)的電動(dòng)車上用得較少。目前電動(dòng)車行業(yè)內(nèi)使用的無(wú)刷電機(jī),普遍采用有位置傳感器無(wú)刷電機(jī)。
有位置傳感器永磁直流無(wú)刷電機(jī)按照內(nèi)部傳感器的安裝位置不同,又可分為60度電機(jī)和120度電機(jī)。在120°的霍爾信號(hào)中,不可能出現(xiàn)二進(jìn)制000和111的編碼,所以在一定程度上避免了因霍爾零件故障而導(dǎo)致的誤操作。因?yàn)榛魻柦M件是開(kāi)漏輸出,高電平依靠電路上的上拉電阻提供,一旦霍爾零件斷電,霍爾信號(hào)輸出就是111.一旦霍爾零件短路,霍爾信號(hào)輸出就是000,而60°的霍爾信號(hào)在正常工作時(shí)這兩種信號(hào)均會(huì)出現(xiàn),所以一定程度上影響了軟件判斷故障的準(zhǔn)確率。因此目前市面馬達(dá)已經(jīng)逐漸舍棄60°相位的霍爾排列。
2.永磁直流電機(jī)基本原理
2.1.主回路電路
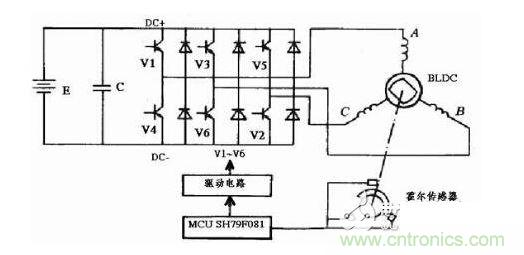
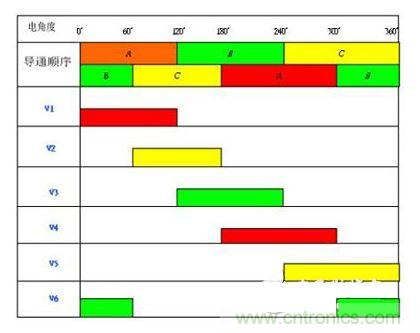
圖中ABC表示電機(jī)的3相繞組,采用星形接法,V1~V6表示功率場(chǎng)效應(yīng)管,如果將V1~V6用如下的時(shí)序波形驅(qū)動(dòng),則3相繞組會(huì)按照AB-AC-BC-BA-CA-CB順序通電(AB表示電流由A相流向B相),產(chǎn)生一個(gè)旋轉(zhuǎn)的磁場(chǎng),牽引外轉(zhuǎn)子(永磁體)旋轉(zhuǎn)。
導(dǎo)通順序
3.電動(dòng)車控制器功能要求
*功能性要求:1.電子換相2.無(wú)級(jí)調(diào)速3.剎車斷電4.附加功能A.限速B.1+1助力C.EBS柔性電磁剎車D.定速巡航E.其它功能(消除換相噪音,倒車等)
*安全性要求:1.限流驅(qū)動(dòng)2.過(guò)流保護(hù)3.堵轉(zhuǎn)保護(hù)4.電池欠壓保護(hù)5.降低溫升6.附加功能(防盜鎖死,溫升限制等)
7.附加故障檢測(cè)功能從上面的要求來(lái)看,功能性要求和安全性要求的前三項(xiàng)用專用控制芯片用加上適當(dāng)?shù)耐鈬娐肪浑y解決,代表芯片是摩托羅拉的 MC33035($1.8840),早期的控制器方案均用該集成塊解決。但后來(lái)隨著競(jìng)爭(zhēng)加劇,很多廠商都增加了不少附加功能,一些附加功能用硬件來(lái)實(shí)現(xiàn)就比較困難,所以使用單片機(jī)來(lái)做控制的控制器迅速取代了純硬件的專用控制芯片。
但是硬件控制和軟件控制有很大的區(qū)別,硬件控制的反應(yīng)速度僅僅受限于邏輯門的開(kāi)關(guān)速度,而軟件的運(yùn)行則需要指令執(zhí)行時(shí)間。要使軟件跟得上電機(jī)控制的需求,就必須要求軟件在最短的時(shí)間內(nèi)能夠正確處理?yè)Q相,電流限制等各種復(fù)雜動(dòng)作,這就涉及到一個(gè)對(duì)外部信號(hào)的采樣頻率,采樣時(shí)機(jī),信號(hào)的內(nèi)部處理判斷及處理結(jié)果的輸出,還有一些抗干擾措施等,這些都是軟件設(shè)計(jì)中需要仔細(xì)考慮的東西。
在本方案中,我們采用了一顆集成PWM發(fā)生器的8位單片機(jī)SH79F081,采用優(yōu)化的單機(jī)器周期8051內(nèi)核,內(nèi)置16kFlash存儲(chǔ)器,兼容傳統(tǒng) 8051所有硬件資源,采用JTAG仿真方式,內(nèi)置16.6MHz振蕩器,同時(shí)擴(kuò)展了如下功能:*雙DPTR指針。16位x8乘法器和16位/8除法器。
*3通道帶死區(qū)控制PWM,6路輸出,輸出極性可設(shè),提供周期溢出功能*集成故障檢測(cè)功能,可瞬時(shí)關(guān)閉PWM輸出。
*提供硬件抗干擾措施。
*集成高速10bitADC.*提供Flash自編程功能,可以模擬用做EEROM,方便存儲(chǔ)參數(shù)。
這顆IC由于CPU運(yùn)行速度和AD采樣速度都很快,PWM功能強(qiáng)大,硬件抗干擾功能多,非常適合作電動(dòng)車控制器。
4.軟件實(shí)現(xiàn)
下面我們挑選對(duì)控制器性能和安全比較重要的功能來(lái)討論編程中應(yīng)該注意的問(wèn)題。
4.1.減小換相噪聲
上文已提過(guò),無(wú)刷直流電動(dòng)機(jī)方波驅(qū)動(dòng)最大的缺點(diǎn)是換相時(shí)電流不能持續(xù),導(dǎo)致有轉(zhuǎn)矩脈動(dòng),因此衡量控制器好壞很大程度上是取決于換相是否能做好。
在電動(dòng)車剛剛起步的時(shí)候我們會(huì)發(fā)現(xiàn)換相時(shí)電機(jī)會(huì)發(fā)出很大的突突聲,這是由于電機(jī)起步時(shí)電流比較大,而電機(jī)是個(gè)感性負(fù)載,換相后由于電機(jī)線圈電流不會(huì)一下增大到換相前的水平,這樣就造成換相前后電流反差非常大,從而導(dǎo)致?tīng)恳Φ募眲∽兓?,這種變化便會(huì)引起電機(jī)強(qiáng)烈振動(dòng),這種振動(dòng)噪聲不能完全消除,但可以采取一些措施減小噪聲方法1:在換相后的一段時(shí)間使PWM脈沖占空比達(dá)到100%來(lái)使電流增長(zhǎng)快一點(diǎn),從而減輕振動(dòng)噪聲。需要提醒的是在這個(gè)過(guò)程中我們需要隨時(shí)監(jiān)測(cè)電流變化,電流一達(dá)到換相前的水平就可以恢復(fù)換相前的PWM占空比。
方法2:延遲關(guān)閉換相MOS管,方波驅(qū)動(dòng)直流無(wú)刷電機(jī)是 6步驅(qū)動(dòng),定子勵(lì)磁每隔60度電角度跳躍一次,保證定子磁動(dòng)勢(shì)方向和轉(zhuǎn)子磁動(dòng)勢(shì)方向夾角在60°到120°之間運(yùn)行,因?yàn)閵A角在90°時(shí)轉(zhuǎn)動(dòng)力矩最大,夾角為0°或180°時(shí)沒(méi)有轉(zhuǎn)矩,現(xiàn)假設(shè)電機(jī)正轉(zhuǎn),AB導(dǎo)通要切換到AC導(dǎo)通,此時(shí)AB繞組通電產(chǎn)生的定子磁勢(shì)和轉(zhuǎn)子磁勢(shì)夾角為60°,如果正常切換到AC 導(dǎo)通,則AC繞組通電后,定子磁勢(shì)和轉(zhuǎn)子磁勢(shì)夾角變?yōu)?20°,由于切換到AC通電后電流要從0開(kāi)始爬升,因此此時(shí)定子磁勢(shì)幅值很小,導(dǎo)致轉(zhuǎn)矩降低,但如果此時(shí)不關(guān)閉B,同時(shí)將下橋C打開(kāi),則定子磁勢(shì)和轉(zhuǎn)子磁勢(shì)的夾角變?yōu)?0°,而且由于AB相電流基本沒(méi)有變化,而C相電流還很小,因此換相前后轉(zhuǎn)矩變化很小,但要注意,等C相電流爬升后要將B相關(guān)閉,否則3相導(dǎo)通的合成力矩比2相導(dǎo)通力矩大,也會(huì)發(fā)生轉(zhuǎn)矩波動(dòng)。
4.2.電子剎車:
電子剎車其實(shí)是將電動(dòng)機(jī)當(dāng)做發(fā)電機(jī)機(jī)運(yùn)行,因此會(huì)產(chǎn)生電磁制動(dòng)轉(zhuǎn)矩,檢測(cè)到電子剎車信號(hào)后,cpu將上三路PWM關(guān)閉,將下三路同時(shí)打開(kāi),占空比設(shè)為某一固定值,這樣,電機(jī)相當(dāng)于工作在發(fā)電機(jī)狀態(tài),給蓄電池充電,充電電流和下三路占空比有關(guān),占空比越大,則充電電流越大,剎車制動(dòng)能力越強(qiáng),由于目前電動(dòng)車上裝配的電子剎車都是開(kāi)關(guān)信號(hào),使用者無(wú)法調(diào)整剎車力矩,完全由控制器決定,不過(guò)由電動(dòng)機(jī)的特性,即使占空比固定,電子剎車時(shí)轉(zhuǎn)速越高,發(fā)電機(jī)感生電壓越高,回饋充電能力越強(qiáng),剎車力矩越大,當(dāng)然,最好是裝配線性剎車傳感器,使用者會(huì)更方便。
4.3.恒流驅(qū)動(dòng)
電流信號(hào)經(jīng)康銅絲采樣之后分兩路,一路送至放大器,一路送至比較器。放大器用來(lái)實(shí)時(shí)放大電流信號(hào),放大倍數(shù)大約6.5倍,放大后的信號(hào)提供給單片機(jī)進(jìn)行 AD采樣轉(zhuǎn)換,轉(zhuǎn)換所得數(shù)字用來(lái)控制電流不超過(guò)我們所允許的值。另一路信號(hào)送至比較器,當(dāng)電流突然由于某種原因大大超過(guò)允許值,比如一只MOSFET擊穿或誤導(dǎo)通時(shí),比較器翻轉(zhuǎn)送出低電平,送給79F081的FLT引腳,無(wú)需單片機(jī)執(zhí)行程序,IC硬件會(huì)自動(dòng)關(guān)閉PWM輸出,從而保護(hù)MOSFET避免更大傷害。




