
【導(dǎo)讀】本文將介紹如何用FOC電機(jī)控制MATLAB仿真,首先從整體結(jié)構(gòu)及功能介紹,用MATLAB2013以上版本打開文件,看到如圖1所示界面,可以看到仿真最外層由四個(gè)模塊組成:電源模塊(紅色方框)、電機(jī)與控制模塊(藍(lán)色方框)、控制信號給定模塊(黃色方框)、信號分路與顯示模塊(綠色方框)。
整體結(jié)構(gòu)及功能介紹
用MATLAB2013以上版本打開文件,看到如圖1所示界面:
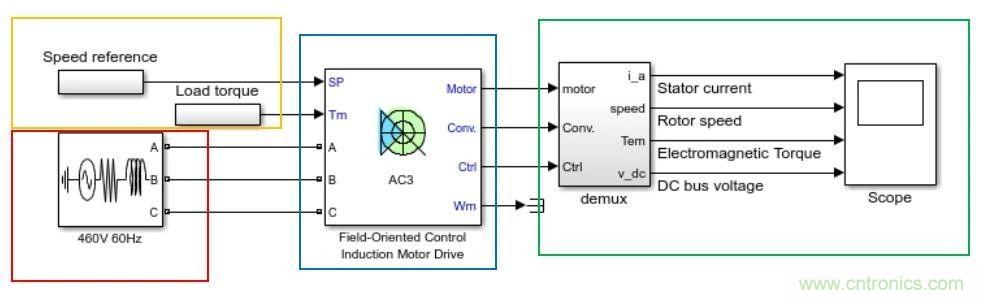
圖1
可以看到仿真最外層由四個(gè)模塊組成:電源模塊(紅色方框)、電機(jī)與控制模塊(藍(lán)色方框)、控制信號給定模塊(黃色方框)、信號分路與顯示模塊(綠色方框)。其系統(tǒng)原理框圖如圖2所示:
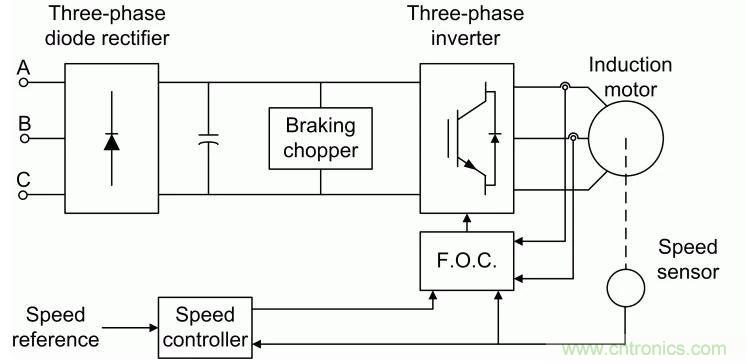
圖2:最上層原理框圖
1、電源模塊
提供三相正弦交流電,幅值、頻率、相位可調(diào)。
2、控制信號給定模塊
可以設(shè)置電機(jī)的給定速度與負(fù)載轉(zhuǎn)矩大小。
3、按轉(zhuǎn)子磁鏈定向的電機(jī)及其控制模塊
此模塊是仿真的主體,實(shí)現(xiàn)對異步電機(jī)主體的轉(zhuǎn)子磁鏈定向控制。
4、信號分路與顯示模塊
通過demux模塊將復(fù)合信號進(jìn)行拆分,得到想要觀測的目標(biāo)信號,并通過示波器進(jìn)行顯示。
FOC Induction Motor Drive模塊的詳細(xì)說明
右鍵點(diǎn)擊FOC(Field-Oriented Control)Induction Motor Drive模塊,按圖3操作可看到此模塊內(nèi)部的具體結(jié)構(gòu),按下圖操作可看到此模塊內(nèi)部的具體結(jié)構(gòu)。
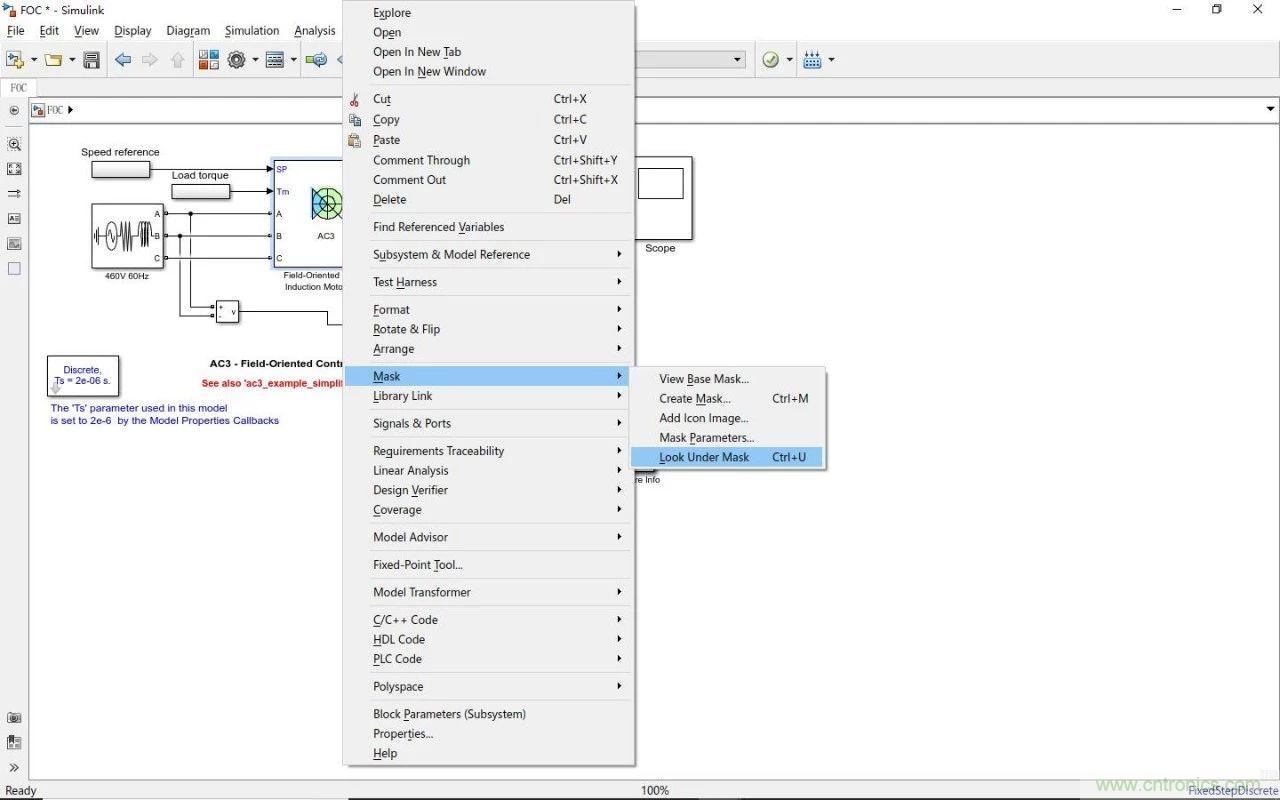
圖3
其內(nèi)部封裝及模塊功能說明如圖4:
控制MATLAB仿真!")
圖4
1、不控整流
將三相交流電源作為輸入,通過此環(huán)節(jié)實(shí)現(xiàn)AC-DC的轉(zhuǎn)換,得到直流電壓。
2、帶制動的斬波控制環(huán)節(jié)
此環(huán)節(jié)可以對獲得的DC電壓進(jìn)行變換,通過斬波調(diào)制的方式得到可調(diào)的直流電壓,是一個(gè)DC-DC的轉(zhuǎn)換環(huán)節(jié)。此外因?yàn)榍奥返腁C-DC環(huán)節(jié)是使用的不控整流,為了解決可能會有的泵升效應(yīng),此環(huán)節(jié)帶有制動功能,將電機(jī)的饋入能量通過制動電阻進(jìn)行消耗。
3、逆變環(huán)節(jié)
此環(huán)節(jié)實(shí)現(xiàn)DC-AC的變換,其輸入的門極信號由FOC模塊的輸出提供,由此得到三相電壓對異步電機(jī)進(jìn)行驅(qū)動。
4、轉(zhuǎn)速調(diào)節(jié)環(huán)節(jié)
實(shí)現(xiàn)電機(jī)對給定轉(zhuǎn)速的追蹤,并作為控制外環(huán),將輸出作為轉(zhuǎn)矩的給定信號送入轉(zhuǎn)子磁鏈定向控制模塊。雙擊此模塊,具體結(jié)構(gòu)如圖5:
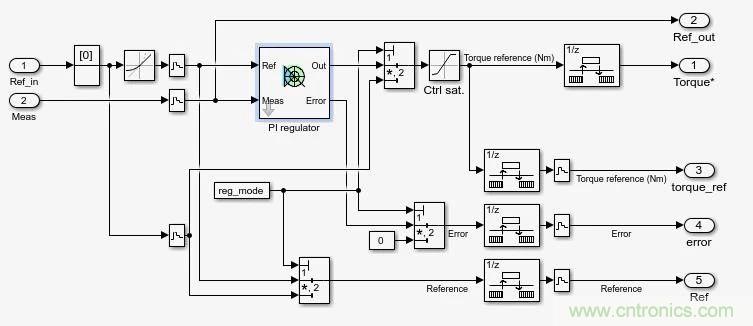
圖5
其簡化的系統(tǒng)框圖如圖6所示:
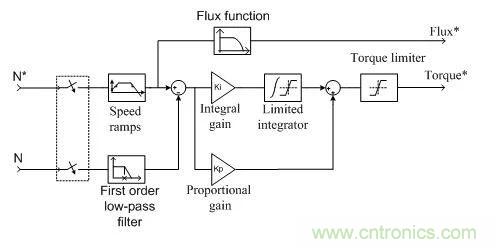
圖6
由實(shí)際轉(zhuǎn)速和給定轉(zhuǎn)速作為輸入量,通過PI控制器得到轉(zhuǎn)矩給定,作為輸出量,送至FOC模塊。其中MagC是一個(gè)二進(jìn)制信號,表示機(jī)器是否足夠磁化以啟動(1)或不(0)。該信號通常由磁場定向控制器FOC提供。
5、FOC模塊
雙擊打開FOC模塊內(nèi)部封裝,可以看到如圖7結(jié)構(gòu):
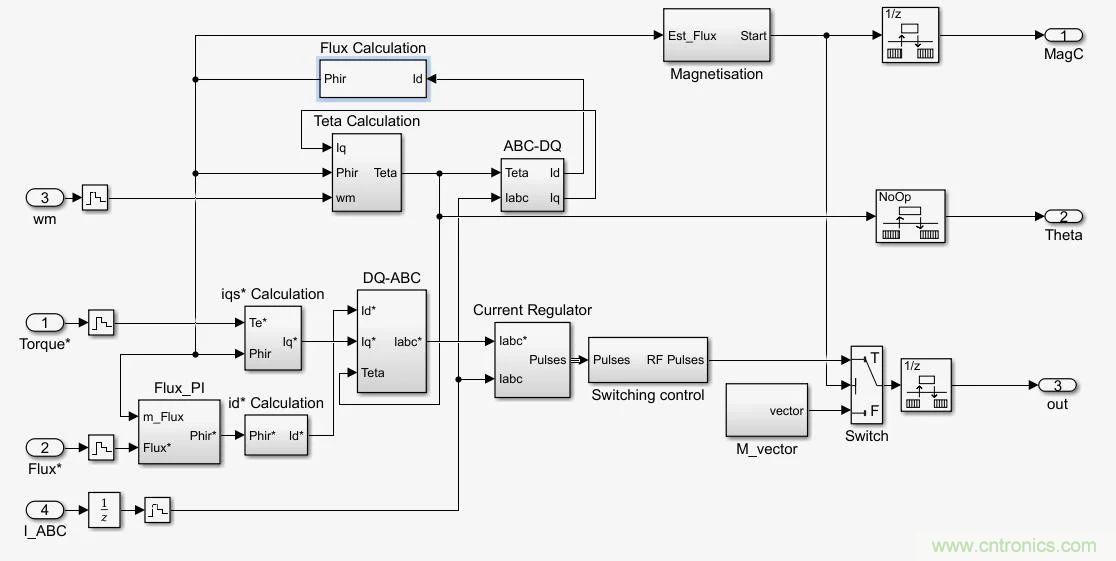
圖7
其中有11個(gè)模塊,簡化的原理框圖如圖8:
控制MATLAB仿真!")
圖8
在FOC控制模塊中總共有11個(gè)子模塊分別是:
Flux calculation(轉(zhuǎn)子磁鏈ψr計(jì)算模塊)通過定子電流的d軸分量計(jì)算轉(zhuǎn)子磁鏈。
Teta calculation(轉(zhuǎn)子磁場相角Θe計(jì)算)
ABC-DQ(3/2變換)
DQ-ABC(2/3變換)
iqs*計(jì)算模塊通過計(jì)算所得的轉(zhuǎn)子磁通和轉(zhuǎn)矩給定求取長生電磁轉(zhuǎn)矩的定子電流q軸分量。
ids*計(jì)算模塊通過給定轉(zhuǎn)子磁通計(jì)算產(chǎn)生轉(zhuǎn)子磁通的定子電流d軸分量。
電流滯環(huán)調(diào)節(jié)器(Current regulator)通過電流滯環(huán)比較產(chǎn)生驅(qū)動逆變器的脈沖。
開關(guān)控制模塊(Switching control)將逆變器換向頻率最大值限制為用戶給定的最大值。
磁通控制器(Flux_PI)通過PI控制,減少穩(wěn)態(tài)磁通誤差,控制磁通動態(tài)變化。
磁化矢量模塊(M_vector)創(chuàng)建電機(jī)初始磁通矢量。
磁化控制模塊(Magnetization)提供磁化和正常工作模式下的邏輯信號,也即產(chǎn)生MagC信號。
6、測量及異步電機(jī)模塊
對逆變器輸出量進(jìn)行測量,并且可以對異步電機(jī)的參數(shù)進(jìn)行設(shè)置。
波形分析
運(yùn)行仿真,得到如圖9所示波形
控制MATLAB仿真!")
圖9
0-0.045s:開始的時(shí)候,轉(zhuǎn)速為零,轉(zhuǎn)矩為零,定子電壓和直流側(cè)電壓不為零,此階段為磁化階段,定子電流建立磁場。
0.045-0.5s:磁化完成,電機(jī)開始進(jìn)行轉(zhuǎn)速調(diào)節(jié),轉(zhuǎn)速升高。定子電流頻率隨著轉(zhuǎn)速升高減小。
0.5-0.6s:到0.5s時(shí),負(fù)載轉(zhuǎn)矩增加為設(shè)定值,為了維持轉(zhuǎn)速的增加,電磁轉(zhuǎn)矩相應(yīng)增大,定子電流增加,定子電流頻率隨著轉(zhuǎn)速升高進(jìn)一步下降。第0.6s,電機(jī)達(dá)到給定轉(zhuǎn)速500r/min,此時(shí)電磁轉(zhuǎn)矩等于負(fù)載轉(zhuǎn)矩
0.6-1s:電動機(jī)恒速運(yùn)行,轉(zhuǎn)矩與定子電流不再變化。
1-1.5s:此時(shí)轉(zhuǎn)速給定變?yōu)?,電機(jī)電磁轉(zhuǎn)矩減小,電機(jī)在負(fù)載轉(zhuǎn)矩的作用下進(jìn)行減速,定子電流幅值減小,頻率增加。
1.5-1.55s:此時(shí)負(fù)載轉(zhuǎn)矩變?yōu)樨?fù)值,電機(jī)變?yōu)榘l(fā)電機(jī)運(yùn)行,此時(shí)轉(zhuǎn)速不為零,為了跟隨給定轉(zhuǎn)速,電磁轉(zhuǎn)矩要比負(fù)載轉(zhuǎn)矩要小,這樣才能繼續(xù)實(shí)現(xiàn)減速,從而跟隨給定,至1.55s時(shí)轉(zhuǎn)速變?yōu)榱恪?/div>
控制MATLAB仿真!")
1.55-3s:電磁轉(zhuǎn)矩等于負(fù)載轉(zhuǎn)矩,電機(jī)速度為零且保持不變。
電機(jī)參數(shù)
圖10:電機(jī)參數(shù)表
(來源:貿(mào)澤工程師社區(qū),轉(zhuǎn)載自:張飛實(shí)戰(zhàn)電子)
免責(zé)聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請電話或者郵箱聯(lián)系小編進(jìn)行處理。



