
【導(dǎo)讀】互連中的信號完整性損耗對于數(shù)千兆赫茲高度復(fù)雜的SoC來說是非常關(guān)鍵的問題,因此經(jīng)常在設(shè)計(jì)和測試中采用一些特殊的方法來解決這樣的問題。本文介紹如何利用片上機(jī)制拓展JTAG標(biāo)準(zhǔn)使其包含互連的信號完整性測試,從而利用JTAG邊界掃描架構(gòu)測試高速系統(tǒng)級芯片(SoC)的互連上發(fā)生的時延破壞。
互連中的信號完整性損耗對于數(shù)千兆赫茲高度復(fù)雜的SoC來說是非常關(guān)鍵的問題,因此經(jīng)常在設(shè)計(jì)和測試中采用一些特殊的方法來解決這樣的問題。我們認(rèn)為,完整性損耗(本文有時也稱為完整性故障)是在電壓失真(噪聲)和時延破壞(偏移)超過能接受的門限時發(fā)生的。這樣的門限取決于制造所采用的工藝技術(shù)。這種故障情況的發(fā)生有著許多不可預(yù)料的原因,包括:1. 產(chǎn)生寄生值,例如晶體管尺寸、跨導(dǎo)、門限電壓、寄生電阻/電感/電容值等等的工藝變化,以及傳輸線效應(yīng),例如串?dāng)_、過沖、反射,電磁干擾等,這些問題都很難分析而且制造過程中會有變化的互連間耦合效應(yīng)(如耦合電容和互感)。2. SoC中開關(guān)同時切換引起的地線反彈,通常會造成噪聲余量的變化。
完整性故障模型
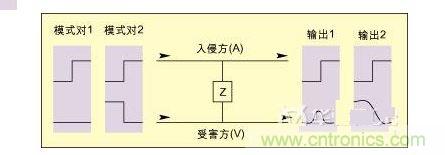
最被廣泛使用的模型是最大入侵方(MA)故障模型,這是許多研究人員用來對長距離互連進(jìn)行串?dāng)_分析和測試的一個簡化模型。如圖1所示,該模型假設(shè)在V(受害方)線上傳輸?shù)男盘枙艿皆诹硗庖粭l相鄰的A(入侵方)線上的信號/變化的影響。這種耦合影響可以用一般的耦合元件Z來概 括。一般來說這種影響的后果是噪聲(引起振鈴和功能錯誤)和時延(引起性能降級)。
本文使用了相同的模型。然而我們需要強(qiáng)調(diào)的是,對何種模式會造成最大的完整性損耗仍有爭論。顯然傳統(tǒng)的MA模型只考慮了電容耦(couplingC),所有的入侵方同時作相同的跳變,而受害方或保持不變(針對最大的振鈴),或作出相反的跳變(針對最大的時延)。當(dāng)互感起作用時,一些研究人員利用其它方式(偽隨機(jī)或恒定)產(chǎn)生測試模式來形成最大的完整性損耗。雖然我們?nèi)允褂肕A模型,但測試方法并不取決于測試模式。在本文中假設(shè)測試模式已被確定,讀者可以看到它們是如何通過增強(qiáng)的JTAG架構(gòu)高效地饋入互連的。
完整性損耗傳感器(ILS)單元
由于千兆赫茲芯片中的完整性損耗已受到越來越多人的重視,一些研究人員開發(fā)出了系列片上傳感器。許多這樣的完整性損耗傳感器(ILS)的基礎(chǔ)都是放大器電路,它能夠檢查出電壓破壞和時延門限。采用D觸發(fā)器的BIST(內(nèi)置自檢)結(jié)構(gòu)被推薦用于運(yùn)放傳播時延偏差的檢測。在測試模式期間,待測試的運(yùn)放或被放置于電壓跟隨器配置中以檢測斜率偏差,或被置于比較器配置中以檢測信號傳播時延偏差。
采用IDDT和邊界掃描方法是解決總線互連缺陷的一種測試技術(shù)示。在本例中一個內(nèi)置傳感器被集成進(jìn)了系統(tǒng)中。該傳感器是一個片上電流鏡像,可以將散亂的電荷轉(zhuǎn)換成相關(guān)的測試時間。噪聲檢測器(ND)和偏移檢測器(SD)單元都是基于改進(jìn)的串耦PMOS差分傳感放大器,因此價格十分便宜。這些單元緊鄰互連的端末,對實(shí)際信號和噪聲進(jìn)行取樣。每當(dāng)噪聲或偏移高于可接受的限值時,這些單元就產(chǎn)生1到0的跳變,并存儲于觸發(fā)器中,以便于進(jìn)一步分析。
有人提供了一個價格較高但更精確的電路,可以皮秒級測試抖動和偏移,這種被稱為EDTC的電路以免打擾方式取樣信號,并通過低速串行信息發(fā)出測試信息。當(dāng)成本不成問題時,精確信號監(jiān)視概念就能被研究人員所接受,甚至?xí)a(chǎn)生片上示波器的想法。
[page]
ILS單元
雖然任何ILS傳感器都能用于完整性損耗檢測,但為了簡單、經(jīng)濟(jì)和實(shí)驗(yàn)的目的,我們還開發(fā)了自己的ILS單元。下面將簡要介紹這種單元的電路和功能,但這種單元的詳細(xì)功能不在本文討論范圍。
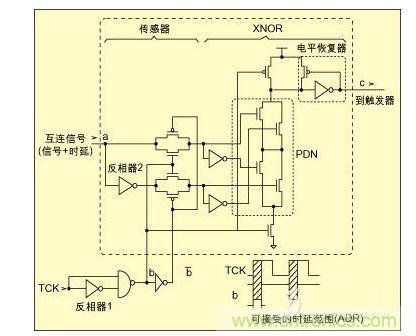
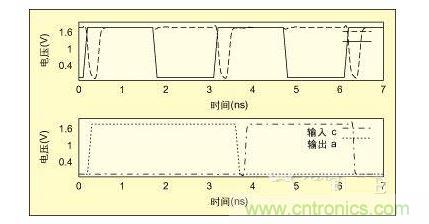
本例所用的ILS是如圖2所示的時延破壞傳感器。可接受的時延范圍(ADR)被定義為觸發(fā)時鐘沿開始的一段時間,所有輸出跳變必須在這段時間內(nèi)發(fā)生。測試時鐘用于創(chuàng)建窗口,以確定可接受的偏移范圍。如果輸入信號a的跳變發(fā)生在b為邏輯’0’的時間內(nèi),那么信號a就在可接受的時 延范圍內(nèi)。任何在b為邏輯’1’的時間內(nèi)發(fā)生的跳變均經(jīng)過傳輸門傳遞給XNOR門,這是利用動態(tài)預(yù)充電邏輯實(shí)現(xiàn)的。根據(jù)合理的時延范圍調(diào)整反向器1。在b 為1的時間內(nèi)有信號跳變時輸出c就為1,直到b變?yōu)?,開始下一個預(yù)充電循環(huán)周期。輸出用來觸發(fā)一個觸發(fā)器。圖3所示為輸入信號a有2個信號跳變的單元 SPICE仿真,采用0.18μm技術(shù)實(shí)現(xiàn)。第1個信號跳變發(fā)生在0.2ns處,當(dāng)時b為0,輸出保持為0。第2個信號跳變發(fā)生在3.5ns處,此時b為1,由于超出了可接受的時延周期,輸出c保持為1直到b變?yōu)?。時延傳感器還能檢測到由串話引起的跳變錯誤。脈沖可以被反饋到觸發(fā)器以存儲時延發(fā)生事件,供以后進(jìn)一步閱讀/分析。
增強(qiáng)的邊界掃描單元
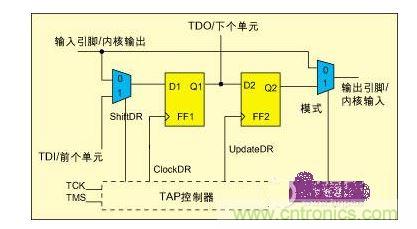
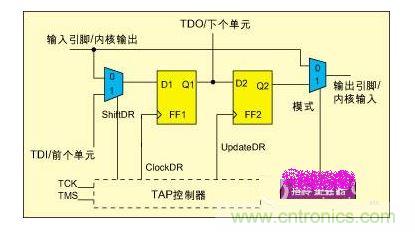
邊界掃描是一種被廣泛使用的測試技術(shù),它要求在輸入或輸出引腳和內(nèi)部內(nèi)核邏輯之間配置邊界掃描單元。邊界掃描測試技術(shù)能夠高效地測試內(nèi)核邏輯和互連。圖4給出了傳統(tǒng)帶移位和更新節(jié)點(diǎn)的標(biāo)準(zhǔn)邊界掃描單元(BSC)。Mode_1使單元處于測試模式。在掃描操作中數(shù)據(jù)通過移位寄存器(Shift-DR狀態(tài))進(jìn)行移位 。通過掃描輸入端口(TDI)被掃描進(jìn)邊界掃描單元的測試模式在Update-DR狀態(tài)(UpdateDR信號)下得到并行使用。連接于內(nèi)部邏輯和輸出引 腳之間的邊界掃描單元可以并行捕獲電路響應(yīng),并通過掃描輸出端口(TDO)掃描輸出。利用JTAG標(biāo)準(zhǔn)(IEEE 1149.1)可以測試互連的粘連、開路和短路等故障情況,這是通過“EXTEST”指令實(shí)現(xiàn)的,在該指令操作下TAP控制器利用BSC從互連中分離出內(nèi) 核邏輯。但這種測試的目的并不是測試互連的信號完整性。為了測試互連的信號完整性,需要對標(biāo)準(zhǔn)架構(gòu)作少許的改進(jìn)。
監(jiān)視BSC(OBSC)
建議在互連的接收側(cè)放置一個新的使用ILS單元的BSC,如圖5所示,這種新的BSC被稱為監(jiān)視BSC(OBSC)。ILS被加在接收側(cè)單元,它們能夠捕獲互連末端上帶噪聲和時延的信號。如果它接收到具有完整性問題(如時延破壞)的信號,它會在輸出端輸出一個脈沖,并將觸發(fā)器置為“1”。OBSC有2種工作模式:
1) 完整性模式(SI=1):選擇信號F。在每個Shift-DR狀態(tài)通過掃描鏈輸出被捕獲的完整性數(shù)據(jù),并用于最終的評估。
2) 正常模式(SI=0):在這種模式中ILS被隔離,每個OBSC被當(dāng)作標(biāo)準(zhǔn)BSC使用。
在掃描輸出過程中,我們需要捕獲輸出F信號并送至FF1。在本例中sel應(yīng)置為0,因此SI和ShiftDR應(yīng)分別為1和 0。當(dāng)掃描輸出過程開始后,D1被傳送到Q1,并用作下一個單元的TDI。信號完整性信息被捕獲進(jìn)FF1后ILS觸發(fā)器復(fù)位。在將F值送至Q1后,必須格式化掃描鏈。在本例的Shift-DR狀態(tài)期間,TDI輸入必須連接至FF1。因此必須將sel置為1(SI=’1’,ShiftDR=’1’)從而隔離出ILS路徑。如圖5所示,SI和ShiftDR需要進(jìn)行或操作,以選擇和發(fā)送信號F到D1,并生成掃描輸出用的掃描鏈。
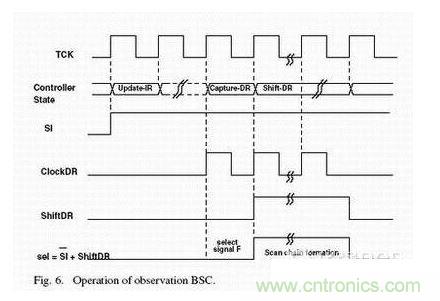
圖6顯示了sel與SI和ShiftDR間的從屬關(guān)系。如圖所示,在Capture-DR狀態(tài),信號F被選中,掃描鏈在 Shift-DR狀態(tài)得到格式化,并根據(jù)被測試的線數(shù)掃描輸出數(shù)據(jù)。表1給出了信號sel的真值表。只有一個控制信號(即SI)是由新指令生成的。執(zhí)行信號完整性信息的監(jiān)視有三種方法:1)應(yīng)用每個測試模式后讀出;2)應(yīng)用測試模式子集后讀出;3)應(yīng)用整個測試模式后一次性讀出。具體選擇哪種方法取決于可接受的時間開銷。第1種方法非常耗時,但它可以盡可能詳細(xì)地顯示每個互連的完整性信息。第3種方法速度非???,但完整性信息比較少,因?yàn)橹荒艿玫侥膫€模式或哪個模式子集引起完整性故障的信息,無法獲知故障類型。方法2可以幫助用戶在測試時間和準(zhǔn)確性之間取得平衡。
[page]
測試架構(gòu)
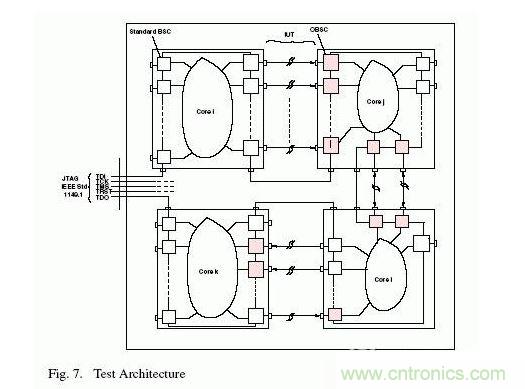
圖7給出了針對小型SoC的整體測試架構(gòu),其中的JTAG輸入(TDI、TCK、TMS、TRST和TDO)使用時沒加任何修改。但定義了一條新的指令,主要用于信號完整性測試中讀取測試結(jié)果。從圖7可以看到,只是每個互連的接收端單元改成了OBSC。對于雙向互連,OBSC 單元用于Core j和Core1之間的雙側(cè)。其它單元都是標(biāo)準(zhǔn)BSC,在信號完整性測試模式期間出現(xiàn)在掃描鏈中。ILS的作用是獨(dú)立的,不需要特殊的控制電路來控制這類單元的時序。由F顯示的完整性信息被掃描輸出,用以確定有問題的互連。
1. EX-SITEST指令
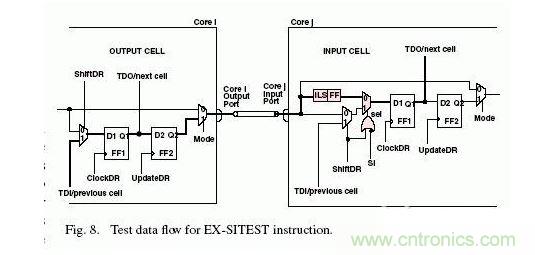
針對新的測試架構(gòu),建議在IEEE 1149.1指令集中增加一條新的指令EX-SITEST。這條指令類似于EXTEST指令,但增加了控制信號SI。在Update-IR狀態(tài),這條指令被解碼并產(chǎn)生(SI_1)。此時輸出單元用作標(biāo)準(zhǔn)BSC,而輸入單元用作OBSC。信號F在Capture-DR狀態(tài)時被捕獲,并在Shift-DR狀態(tài)期間以每個時鐘周期的速度向外移位輸出。本例中TAP控制器狀態(tài)不會改變,但在指令解碼時需要一些變化。存在于內(nèi)核之間的EX-SITEST指令的數(shù)據(jù)流如圖8所示。
2. 測試過程
首先通過EX-SITEST指令裝載TAP控制器IR,然后將所有的測試模式應(yīng)用到互連上,同時ILS單元捕獲互連末端的信號,并檢測所有可能的故障。在測試應(yīng)用過程結(jié)束后,必須讀取存儲于ILS單元FF的結(jié)果。監(jiān)視過程可以利用3種方法之一。比如使用方法3,應(yīng)用所有測試模式,然后一次性讀出完整性信息。
3. 測試數(shù)據(jù)壓縮
在傳統(tǒng)的邊界掃描架構(gòu)(BSA)中,測試模式是一個一個掃描進(jìn)來并應(yīng)用到互連上。舉例來說,采用最大入侵方(MA)故障模型 的n位互連中,12個測試模式被應(yīng)用到每個受害線,在將測試模式應(yīng)用到受害線上時要求12n 時鐘。在n個互連間翻轉(zhuǎn)受害線,總的時鐘數(shù)量(測試應(yīng)用次數(shù))是12n2。當(dāng)然,MA是一個簡化模型。如果采用更復(fù)雜的模型或SoC中具有大量互連時,測試模式數(shù)量會激增,此時壓縮就顯得很有必要了。本文介紹一種針對增加邊界掃描架構(gòu)的簡單有效的壓縮技術(shù)。由于空間有限,本文只能作一簡要介紹,以此說明增 加型JTAG架構(gòu)的靈活性。
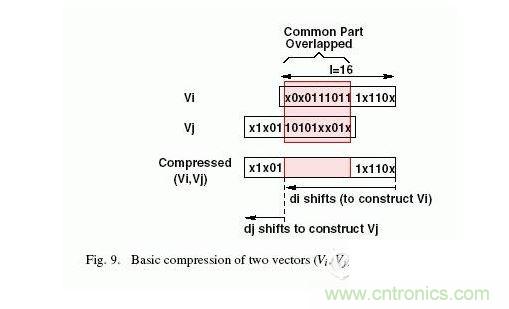
這種壓縮技術(shù)有二個關(guān)鍵點(diǎn)。首先,我們的方法是一個簡捷的無損壓縮法,通過確定相鄰二個模式間的最大相似性并覆蓋它們來構(gòu)筑壓縮位流。其次,由于這種壓縮法即無破壞性也不對模式重新排序,因此不需要額外的解壓縮硬件。而且僅是利用自動測試設(shè)備(ATE)通過控制JTAG TMS控制輸入端執(zhí)行解壓縮過程。當(dāng)測試模式產(chǎn)生后,常會有大量無關(guān)緊要的模式出現(xiàn)在測試模式集中。針對信號完整性產(chǎn)生的模式也是這樣,特別是在考慮了地區(qū)度量標(biāo)準(zhǔn)時(限制開發(fā)模式空間)更是如此。在任何情況下我們都假設(shè)測試集由相同長度的包含不重要的模式組成。圖9表達(dá)了我們的基本壓縮想法,即充分利用不重要的部分覆蓋盡可能多的位來完成2個模式Vi和Vj(長度是1_16)的壓縮。
本文小結(jié)
在本例中,壓縮后的數(shù)據(jù)(Vi,Vj)掃描輸入時只需要21個時鐘,而未壓縮的數(shù)據(jù)需要16+16=32個時鐘。需要注意的是,為了解壓縮指定的數(shù)據(jù)流,我們需要一個模式一個數(shù)字(如本例中的di和dj)才能構(gòu)造(解壓縮)模式。基于邊界掃描測試的目的,這些數(shù)量就是更新 BSC單元內(nèi)容前要求的移位(即時鐘)數(shù)量。我們假設(shè)ATE存儲著解壓縮數(shù)據(jù)(d值如0≤d≤1),在掃描輸入位流時,該數(shù)據(jù)會在d個時鐘后激活TMS (測試模式選擇)信號。然后TMS信號促使TAP控制器產(chǎn)生用于信號完整性測試的正確控制指令(如EX-SITEST)。因此在我們的架構(gòu)中不需要額外的解壓縮硬件。

