
【導讀】環(huán)路控制是開關電源設計的一個重要部分。文章前兩部分分別討論了以固定開關頻率運行的轉(zhuǎn)換器類型、獲取功率級動態(tài)響應以及選擇交越頻率和相位裕度。本篇將主要探討開關電源相關設計示例。
IV設計示例:穩(wěn)定交流/直流反激
我選擇了一個交流/直流適配器項目來說明如何應用上述線路。我們想要穩(wěn)定的轉(zhuǎn)換器通過19.5 V輸出提供2.8 A電源,其原理圖如圖19所示。
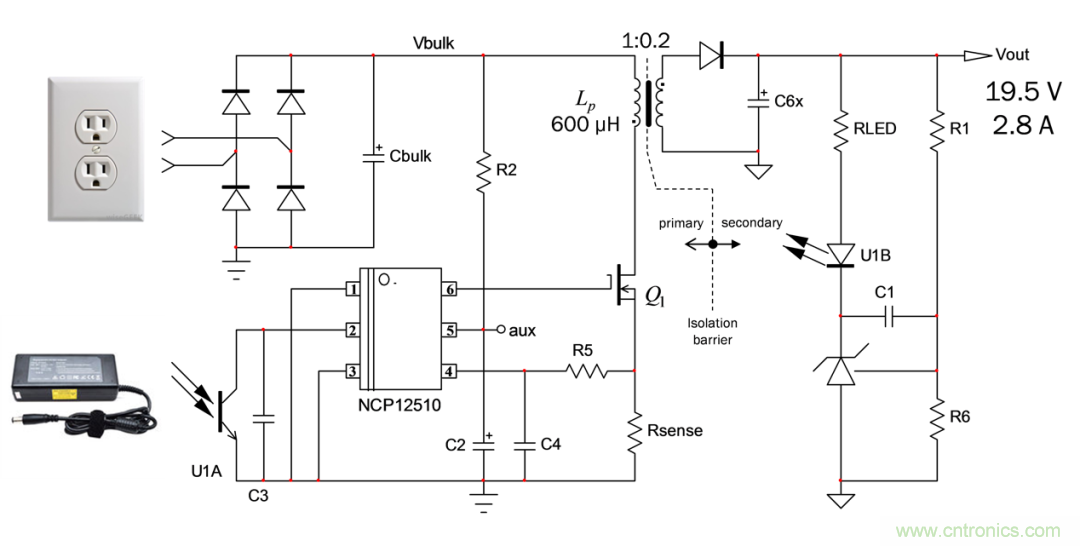
圖19:這個交流/直流轉(zhuǎn)換器提供2.8 A電源,并采用TL431作為反饋環(huán)路
它由整流電源通過二極管電橋和大容量電容供電??紤]到采用正弦波輸入,饋送反激轉(zhuǎn)換器的整流直流電壓預計為圖 20中的正弦波。您可以看到,最低輸入線路(90 V)的電壓峰值約為120V,但谷值降至52V。轉(zhuǎn)換器必須在這個最低輸入條件下提供全功率,否則過載保護可能會跳閘,或輸出中可能會出現(xiàn)令人無法接受的紋波。
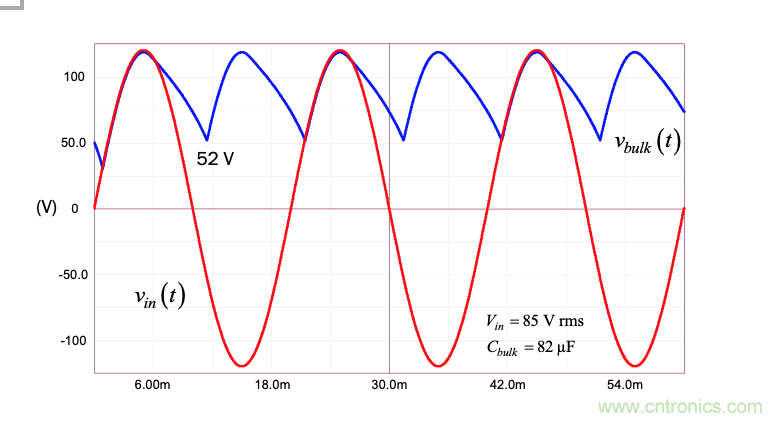
圖20:該交流/直流轉(zhuǎn)換器由受大電壓紋波影響的交流輸入供電
首先,我們需要最低輸入電平時的控制到輸出傳遞函數(shù)。我們可以使用圖 21中描述的SIMPLIS來獲得該函數(shù)。在沒有任何斜率補償?shù)那闆r下,考慮在52V輸入條件下需要進行大量CCM操作,我們預計在頻率為開關頻率的一半時達到響應峰值。
由于SIMPLIS需要在啟動交流分析之前找到周期操作點(POP),我不得不增加一些斜坡補償,以使其實現(xiàn)適當趨同。這個額外的斜坡可由低阻抗驅(qū)動引腳利用RC網(wǎng)絡生成。如果該網(wǎng)絡的時間常數(shù)大于開關周期,則所獲得的斜坡線性非常好,非常適合用于補償目的。圖 22顯示了按周期的結(jié)果和交流結(jié)果。
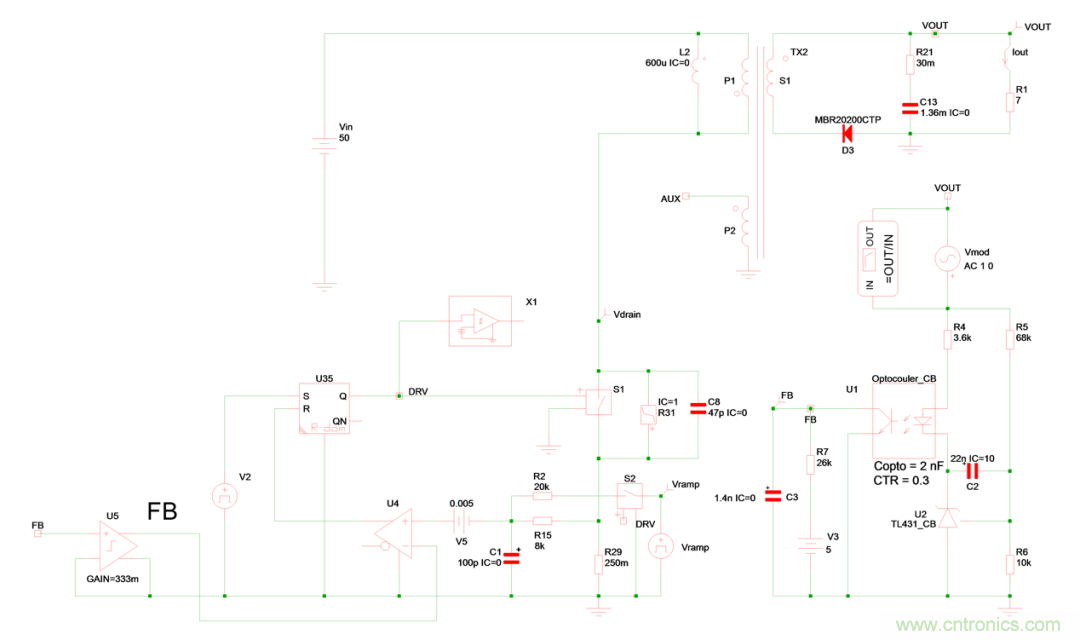
圖21:SIMPLIS將確認操作點,并提供我們需要的功率級小信號響應
計算表明雙極點的Q因數(shù)為負數(shù),這表明位置在右半平面:開關模式非常不穩(wěn)定也就不足為奇了。要選擇交越頻率,我們需要知道右半平面零點的位置。如果使用如此低的輸入電壓,就無法獲得太多帶寬:

其中N為變壓器匝數(shù)比1:N中的N,D為工作占空比,Lp為變壓器初級電感,Rload為負載電阻。
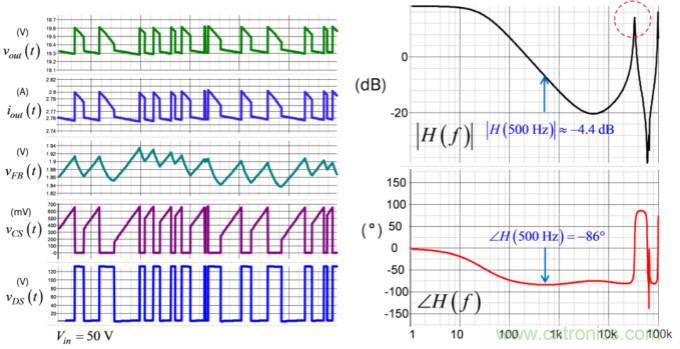
圖22:模擬確認不穩(wěn)定性與大量CCM操作相關聯(lián)
如果我們自己將其限制為該數(shù)字的30%,則500 Hz fc似乎比較合理。為獲得更好的值,您可以選擇增加大容量電容,并將谷值電壓提升至70V,或降低初級電感Lp。您可以將RHPZ推至更高的位置,但考慮到紋波變大,傳導損耗也會隨之增加。根據(jù)從功率級波特圖中500 Hz處提取的數(shù)據(jù)顯示,衰減為4.4 dB,相位滯后為86°。我們可以確定,要實現(xiàn)70°的相位裕度,所需的相位邊限提升(用于修正相位滯后,并實現(xiàn)一些相位裕度)如下:
k因數(shù)非常適合用于穩(wěn)定電流模式電源,并且我們可以確定將第2種類型補償器的極點和零點置于何處。首先,確定k值:

因此,零點將位于:

而極點將位于:

針對500 Hz頻率下的4.4 dB衰減,我們要補償?shù)脑鲆嫒Q于LED串聯(lián)電阻[2]和光耦合器電流傳輸比(CTR):
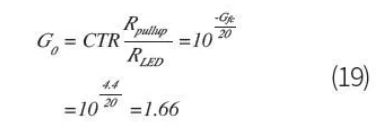
鑒于我們獲得的值,我們可以得出電阻為3.6 kΩ。您必須確認該電阻是否與在最壞情況下將控制器反饋引腳拉低所需的偏置條件兼容。最后,通過調(diào)整光耦合器上的電容,確定高頻極點fp的位置。請注意,我們必須正確表征這個光耦合器,以了解其低頻極點的位置[2]。選定所有元件后,我們可以單獨測試基于TL431的補償器,如圖 23中所示。
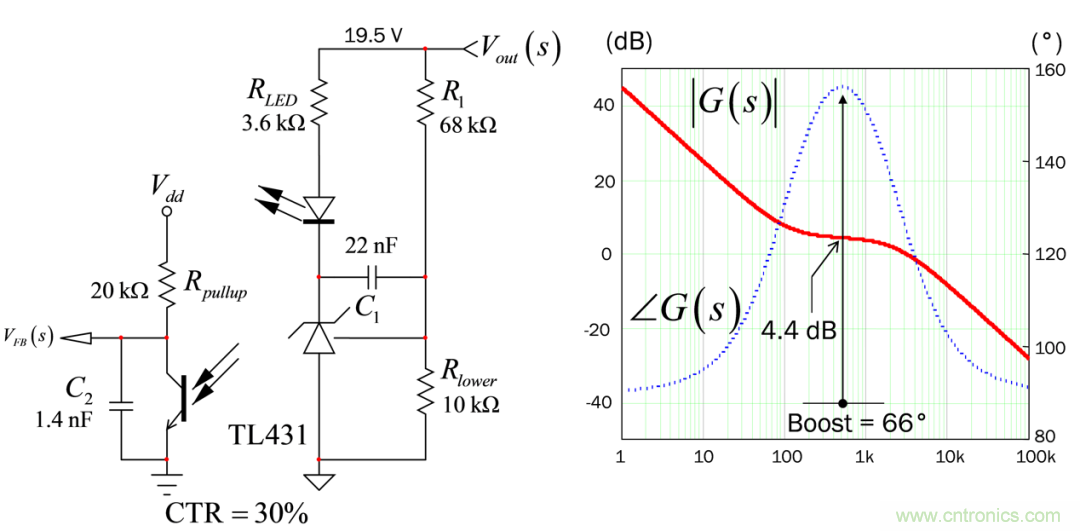
圖23:第2種類型的補償顯示了500 Hz時的預期相位提升
完成該步驟后,您可以使用圖 21中的SIMPLIS模板檢查各種輸入電壓條件下的交越頻率。如圖 24所示,在輸入電壓極值條件下獲得的相位裕度非常不錯。在輸入電壓增至120 V后,交越屏幕馬上就擴展至大約1kHz,而這有利于反應速度。

圖24:在輸入電壓極值條件下,該補償策略可以實現(xiàn)非??捎^的相位裕度
實施補償后,就會執(zhí)行輸出瞬時荷載階躍,而您可以進行響應檢查,如圖 25中所示。欠壓在可控范圍內(nèi),并且恢復時不會出現(xiàn)過壓。下一步就是構(gòu)建原型,并使用網(wǎng)絡分析儀在測試臺上驗證環(huán)路響應。
圖25:瞬態(tài)響應表明低壓和高壓條件下的輸出波形比較穩(wěn)定
該實測試驗至關重要,不能跳過。您可以通過該試驗知曉,在進行轉(zhuǎn)換器及其補償電路建模時做的假設是否得到實際電路板測量的證實。通過將試驗結(jié)果反饋給模型,您可以在計算機上進行最壞情況分析,并確信是否與實際情況相符。
結(jié)論
本文詳細介紹了設計開關轉(zhuǎn)換器補償部分的各種方法。文中首先介紹了功率級控制到輸出傳遞函數(shù),該函數(shù)可通過以下不同途徑獲得:使用平均模型模擬;推導小信號方程或使用分段線性引擎(如SIMPLIS)。在使用的模擬模板與您設置的相位裕度和增益裕度相符后,必須將您的結(jié)果與通過測試臺上原型獲得的結(jié)果進行比較。然后,在經(jīng)過驗證的模型上進行參數(shù)掃描分析、蒙特卡洛分析和最壞情況分析,以確保向市場推出質(zhì)量合格且經(jīng)久耐用的產(chǎn)品。
免責聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請聯(lián)系小編進行處理。
推薦閱讀:

