

【導讀】在電機的運行中,是由電機定子和轉(zhuǎn)子磁場同步旋轉(zhuǎn),建立的一個具有同步旋轉(zhuǎn)速度的旋轉(zhuǎn)坐標系,這個旋轉(zhuǎn)坐標系就是常說的D-Q旋轉(zhuǎn)坐標系。在該旋轉(zhuǎn)坐標系上,所有電信號都可以描述為常數(shù)。為了方便電機矢量控制問題的研究,能否由儀器直接得到D-Q變換的結果呢?
D-Q變換是一種解耦控制方法,它將異步電動機的三相繞組變換為等價的二相繞組,并且把旋轉(zhuǎn)坐標系變換成正交的靜止坐標,即可得到用直流量表示電壓及電流的關系式。D-Q變換使得各個控制量可以分別控制,可以消除諧波電壓和不對稱電壓的影響,由于應用了同步旋轉(zhuǎn)坐標變換,容易實現(xiàn)基波與諧波的分離。
由于直流電機的主磁通基本上唯一地由勵磁繞組的勵磁電流決定,所以這是直流電機的數(shù)學模型及其控制系統(tǒng)比較簡單的根本原因。
如果能將交流電機的物理模型等效地變換成類似直流電機的模式,分析和控制就可以大大簡化。坐標變換正是按照這條思路進行的。
交流電機三相對稱的靜止繞組A 、B 、C ,通以三相平衡的正弦電流時,產(chǎn)生的合成磁動勢是旋轉(zhuǎn)磁動勢F,它在空間呈正弦分布,以同步轉(zhuǎn)速ws(即電流的角頻率)順著A-B-C的相序旋轉(zhuǎn)。這樣的物理模型繪于下圖中。

旋轉(zhuǎn)磁動勢并不一定非要三相不可,除單相以外,二相、三相、四相、……等任意對稱的多相繞組,通以平衡的多相電流,都能產(chǎn)生旋轉(zhuǎn)磁動勢,當然以兩相最為簡單。圖2中繪出了兩相靜止繞組a和b它們在空間互差90°,通以時間上互差90°的兩相平衡交流電流,也產(chǎn)生旋轉(zhuǎn)磁動勢F。
當圖1和2的兩個旋轉(zhuǎn)磁動勢大小和轉(zhuǎn)速都相等時,即認為圖2的兩相繞組與圖1的三相繞組等效。圖3兩個匝數(shù)相等且互相垂直的繞組d 和q,其中分別通以直流電流id和iq,產(chǎn)生合成磁動勢F,其位置相對于繞組來說是固定的。如果讓包含兩個繞組在內(nèi)的整個鐵心以同步 轉(zhuǎn)速旋轉(zhuǎn),則磁動勢F自然也隨之旋轉(zhuǎn)起來,成為旋轉(zhuǎn)磁動勢。把這個旋轉(zhuǎn)磁動勢的大小和轉(zhuǎn)速也控制成與圖1 和圖2中的磁動勢一樣,那么這套旋轉(zhuǎn)的直流繞組也就和前面兩套固定的交流繞組都等效了。
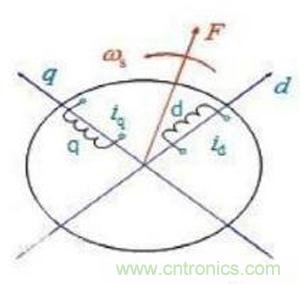
圖3.旋轉(zhuǎn)的直流繞組
由此可見,以產(chǎn)生同樣的旋轉(zhuǎn)磁動勢為準則,圖1的三相交流繞組、圖2的兩相交流繞組和圖3中整體旋轉(zhuǎn)的直流繞組彼此等效。或者說,在三相坐標系下的iA、iB 、iC,在兩相坐標系下的ia、ib和在旋轉(zhuǎn)兩相坐標系下的直流id、iq是等效的,它們能產(chǎn)生相同的旋轉(zhuǎn)磁動勢。
D-Q坐標變換的應用
電機坐標變換理論在電氣工程領域已經(jīng)被廣泛應用,不但在電機控制及瞬態(tài)分析方面被廣泛應用,而且在電力系統(tǒng)故障分析以及電網(wǎng)電能質(zhì)量的檢測與控制等領域也被采用,電機坐標變換理論的應用主要有以下幾方面。
1、電機控制
2、電機的瞬態(tài)運行分析
3、電機的故障診斷
測試方法
D-Q變換在電機測試中的應用非常廣泛。只要能準確得到轉(zhuǎn)子位置和準確測量三相信號的電流,使用高速的FPGA并行實現(xiàn)實時的算法運算,通過clark變換將相對定子靜止的三相坐標系轉(zhuǎn)換為相對定子靜止的兩相坐標系,得出對應的變換輸出Iα和Iβ,然后使用park變換,將相對定子靜止的兩相坐標系轉(zhuǎn)換為相對轉(zhuǎn)子靜止的兩相坐標系從而算出ID和IQ。電機控制過程是反變換過程,首先設定勵磁電流和轉(zhuǎn)矩電流,然后變換到相對定子靜止的兩相,然后變換到相對定子靜止的三相,從而實現(xiàn)對電機的控制。




