
【導(dǎo)讀】集成式射頻 (RF) 捷變收發(fā)器不僅廣泛用于蜂窩電話基站的軟件定義無(wú)線電 (SDR)1架構(gòu),如多業(yè)務(wù)分布式接入系統(tǒng) (MDAS) 和小基站單元等,也適用于工業(yè)、商業(yè)以及軍事應(yīng)用中的無(wú)線高清視頻傳輸,如無(wú)人飛行器 (UAV) 應(yīng)用。
本文將剖析使用AD9361/AD93642,3集成式收發(fā)器IC實(shí)現(xiàn)寬帶無(wú)線視頻信號(hào)鏈的過(guò)程,以及傳輸?shù)臄?shù)據(jù)量、相應(yīng)的RF占用信號(hào)帶寬、傳輸距離和發(fā)射功率。文中還將描述OFDM物理層的實(shí)現(xiàn),并列出用于避免射頻干擾的跳頻時(shí)間測(cè) 試結(jié)果。最后,我們將討論Wi-Fi和RF捷變收發(fā)器在寬帶無(wú)線應(yīng)用方面的優(yōu)缺點(diǎn)。
信號(hào)鏈
圖1所示為采用AD9361/AD9364和BBIC的簡(jiǎn)化無(wú)線視頻傳輸方案。攝像機(jī)捕捉到影像,并通過(guò)以太網(wǎng)、HDMI®、USB或其他接口將視頻數(shù)據(jù)發(fā)送至基帶處理器。圖像編碼/解碼可通過(guò)硬件或FPGA處理。RF前端包括RF開(kāi)關(guān)以及連接到可編程集成式收發(fā)器的LNA和PA。
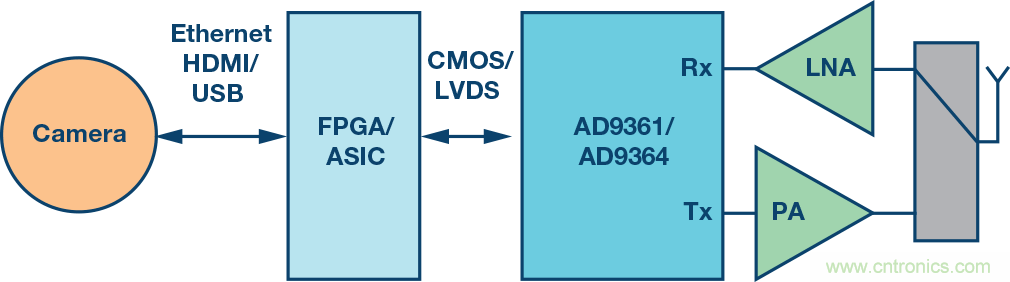
圖1. 無(wú)線視頻傳輸示意圖。
需要傳輸多少數(shù)據(jù)
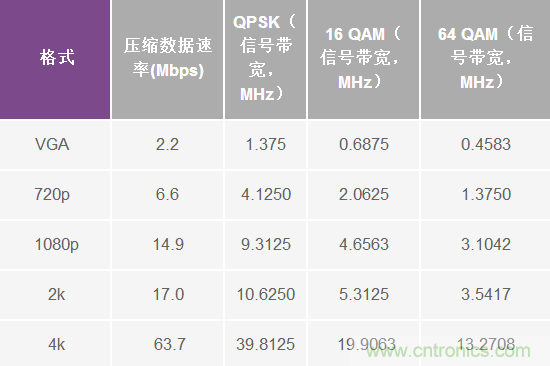
表1列出了未壓縮數(shù)據(jù)速率和壓縮數(shù)據(jù)速率之間的顯著差異。通過(guò)使用高效視頻編碼 (HE VC) 技術(shù),也就是H.265和MPEG-H第2部分,可以降低數(shù)據(jù)速率并節(jié)省帶寬。H.264是目前最常用于錄像、壓縮及視頻內(nèi)容分布的格式。它體現(xiàn)了視頻壓縮技術(shù)的巨大進(jìn)步,并且在未來(lái)有可能接替現(xiàn)已廣泛使用的AVC(H.264和MPEG-4第10部分)技術(shù)。
表1總結(jié)了不同視頻格式下的未壓縮和已壓縮數(shù)據(jù)速率。其假設(shè) 條件是視頻的位深度為24位,幀速率為60 fps。在1080p的例子中, 壓縮后的數(shù)據(jù)速率為14.93 Mbps,這樣的數(shù)據(jù)率才會(huì)更加容易地被 基帶處理器和無(wú)線物理層進(jìn)行處理。
表1. 壓縮數(shù)據(jù)速率

信號(hào)帶寬
通過(guò)改變采樣速率、數(shù)字濾波器和抽取參數(shù),AD9361/AD9364可支持的通道帶寬范圍為低于200 kHz到56 MHz。AD9361/AD9364為 零中頻收發(fā)器,具有用來(lái)發(fā)射復(fù)數(shù)數(shù)據(jù)的I通道和Q通道。復(fù)數(shù)數(shù)據(jù)含有實(shí)部和虛部,分別對(duì)應(yīng)I通道和Q通道,它們位于同一頻帶上,因此其頻譜效率是單通道頻譜效率的兩倍。壓縮視頻數(shù)據(jù)可以映射到I和Q通道以創(chuàng)建星座點(diǎn),也就是符號(hào)。圖2顯示了一個(gè)16QAM的例子,每個(gè)星座點(diǎn)符號(hào)代表四個(gè)二進(jìn)制比特。
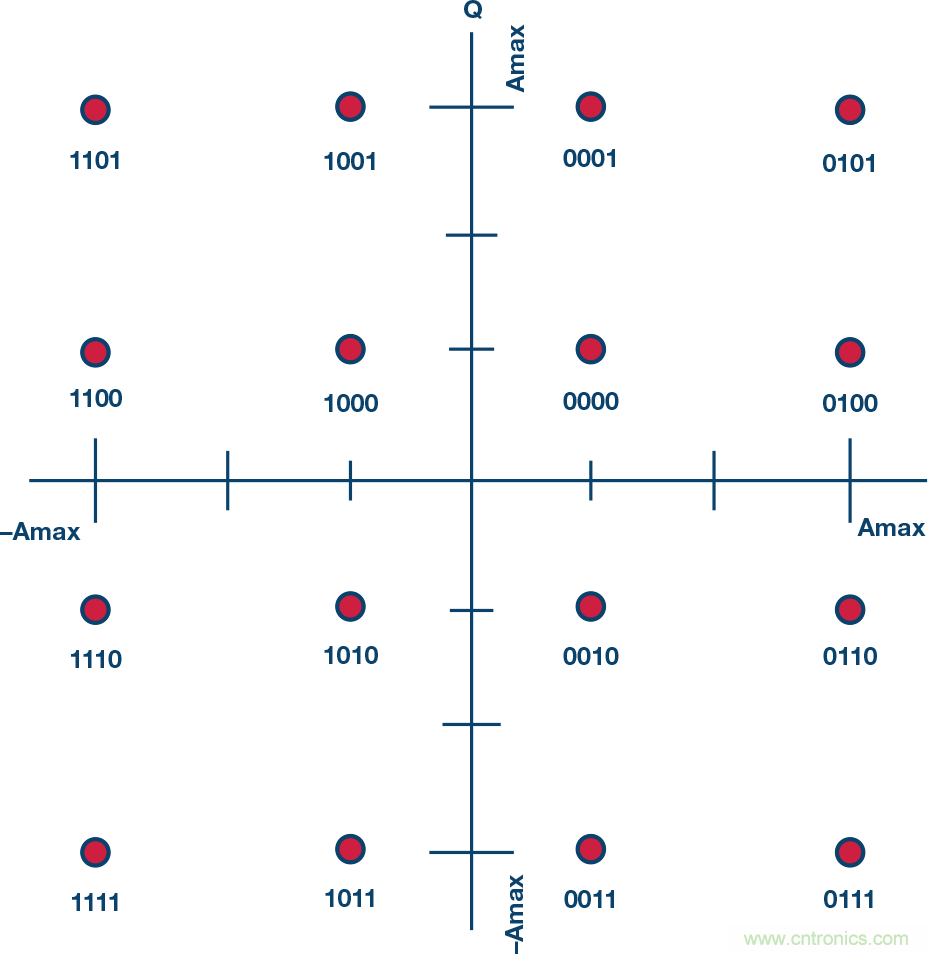
圖2. 16 QAM星座圖。4
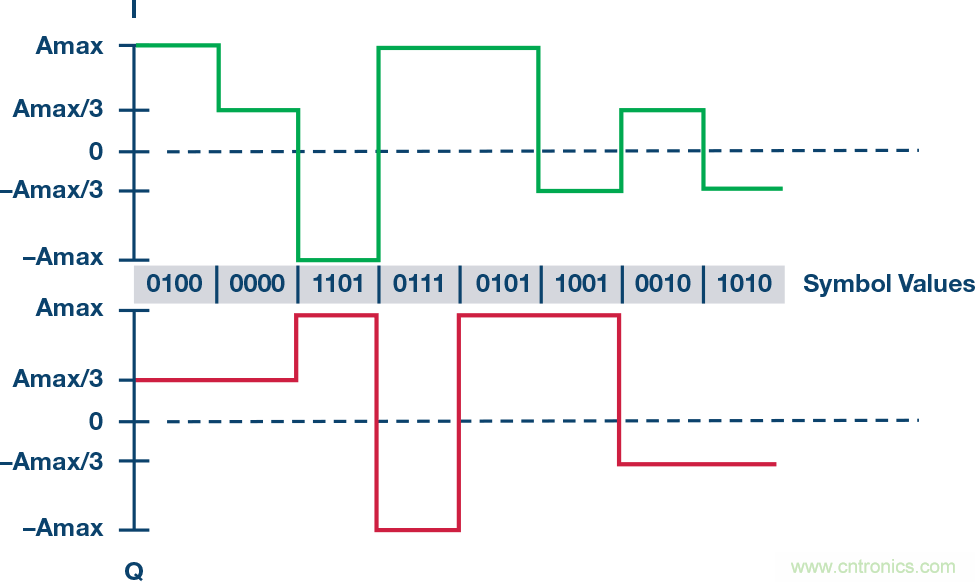
圖3. 星座圖中I和Q數(shù)字波形。4
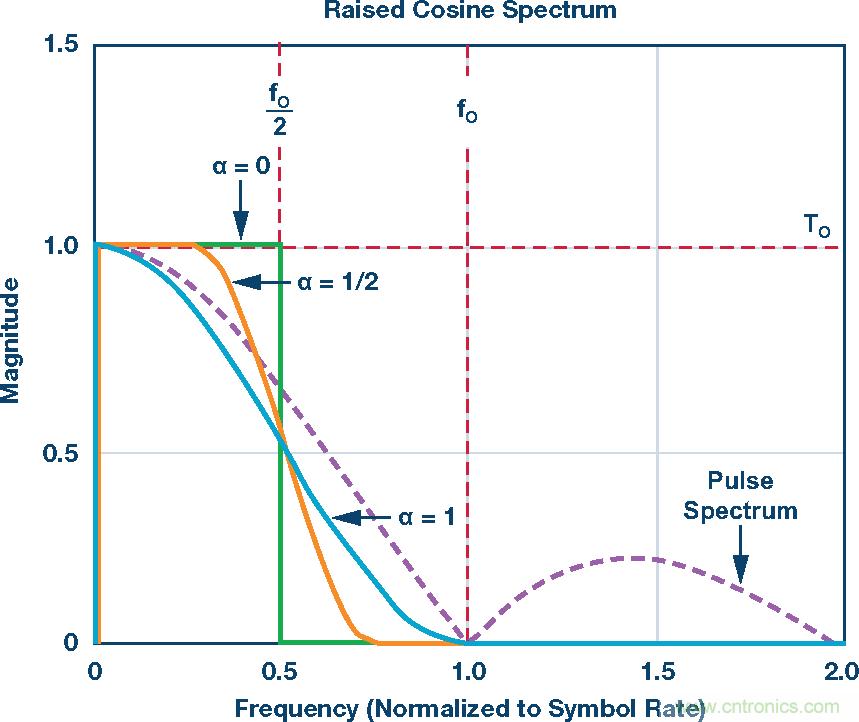
圖4. 脈沖整形濾波器響應(yīng)。4
對(duì)于單載波系統(tǒng),I和Q數(shù)字波形在進(jìn)入DAC之前需要通過(guò)脈沖整形濾波器,使所傳輸?shù)男盘?hào)在有限帶寬內(nèi)成形。脈沖整形可使用FIR濾波器,濾波器響應(yīng)如圖4所示。為了確保信息逼真度,必須滿足對(duì)應(yīng)于符號(hào)速率的最小信號(hào)帶寬。符號(hào)速率與壓縮視頻數(shù)據(jù)成正比,如下式所示。對(duì)于OFDM系統(tǒng),應(yīng)使用IFFT將復(fù)數(shù)數(shù)據(jù)調(diào)制到各個(gè)子載波上,使其在有限帶寬內(nèi)傳輸信號(hào)。
每個(gè)符號(hào)對(duì)應(yīng)的位數(shù)取決于調(diào)制階數(shù)。
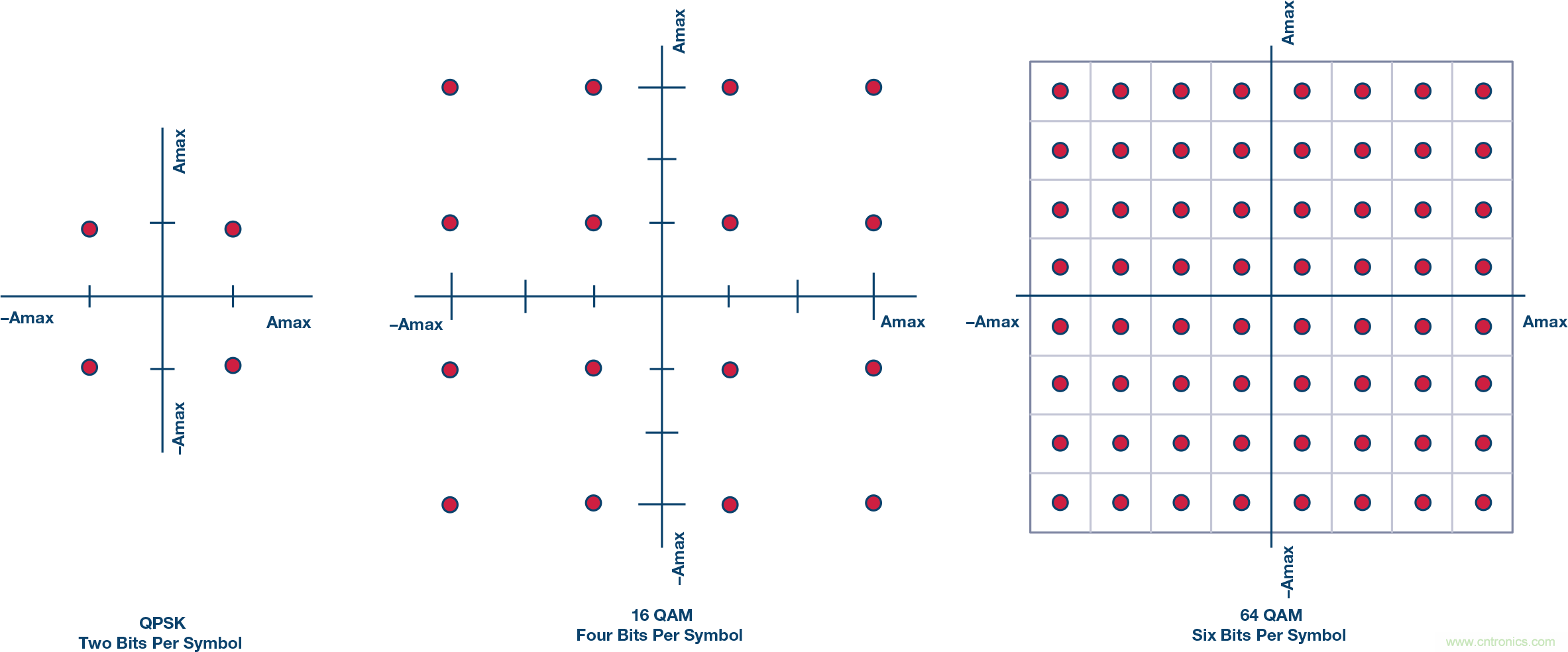
圖5. 調(diào)制階數(shù)。
所占用信號(hào)帶寬為
其中α表示濾波器的帶寬參數(shù)。
根據(jù)前面的公式,可以推導(dǎo)出

從而,我們可以計(jì)算出RF占用信號(hào)帶寬,如表2中的總結(jié)所示。
表2.各種調(diào)制階數(shù)的RF占用信號(hào)帶寬 (α = 0.25)
AD9361/AD9364可實(shí)現(xiàn)56 MHz信號(hào)帶寬,支持表2中所有視頻格式的傳輸,并且支持更高的幀速率。高階調(diào)制占用的帶寬更小,每個(gè)碼元可表示更多的信息/位,但是解調(diào)所需的信噪比 (SNR) 更高。
傳輸距離和發(fā)射器功率
在無(wú)人飛行器等應(yīng)用中,最大傳輸距離是一個(gè)關(guān)鍵參數(shù)。但是,保持通信不中止同樣很重要,即使距離較小時(shí)也是如此。氧氣、水和其他障礙物(自由空間衰減除外)可能會(huì)使信號(hào)衰減。
圖6顯示了無(wú)線通信通道損耗的模型。
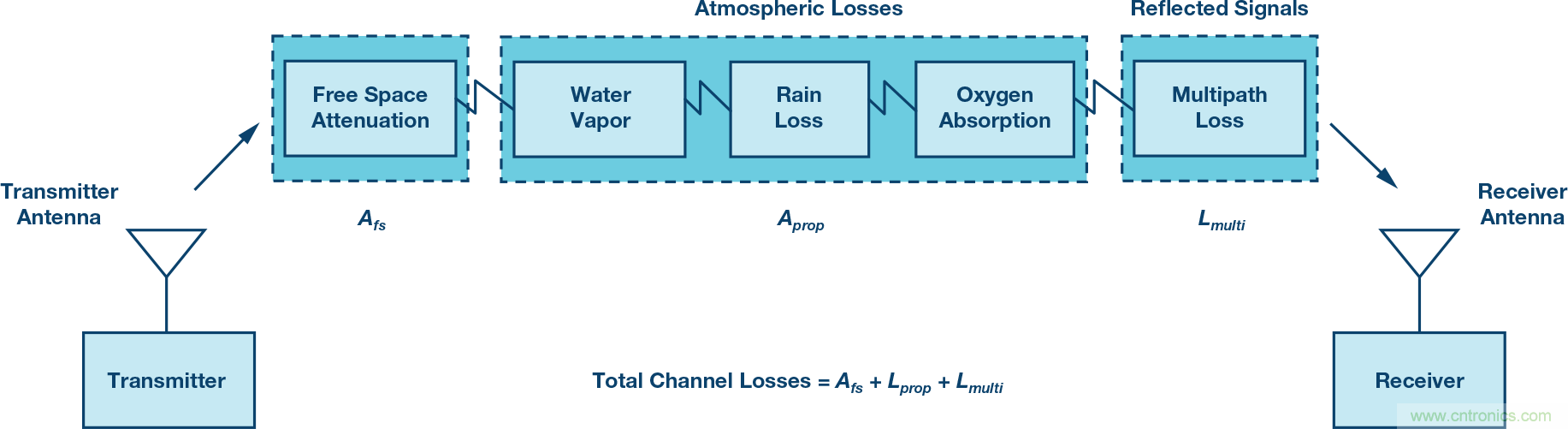
圖6. 無(wú)線通信通道損耗模型。5
通常將解調(diào)或恢復(fù)發(fā)射器信息所需的最小輸入信號(hào) (Smin) 作為接 收器靈敏度。獲得接收器靈敏度后,結(jié)合某些假設(shè)條件可計(jì)算出 最大傳輸距離,如下所示:
(S/N)min表示處理信號(hào)所需的最小信噪比
NF表示接收器的噪聲系數(shù)
k表示玻爾茲曼常數(shù),1.38 × 10–23 joule/k
T0表示接收器輸入的絕對(duì)溫度(開(kāi)爾文) = 290 K
B表示接收器帶寬(單位Hz)
參數(shù)(S/N)min與調(diào)制/解調(diào)階數(shù)相關(guān)。在相同的信噪比下,低階調(diào)制可得到更低的誤碼率,而在相同的誤碼率下,高階調(diào)制需要更高的信噪比來(lái)解調(diào)。因此,如果發(fā)射器離接收器很遠(yuǎn),則接收到的信號(hào)較弱,信噪比不足以支持高階解調(diào)。為了使發(fā)射器保持在線狀態(tài),并使視頻格式保持同一視頻數(shù)據(jù)速率,則基帶應(yīng)使用低階調(diào)制,其代價(jià)是增加帶寬。這樣有助于確保接收到的圖像清晰不模糊。幸運(yùn)的是,我們可通過(guò)具有數(shù)字調(diào)制和解調(diào)功能的軟件定義無(wú)線電來(lái)改變調(diào)制方式。上述分析基于這樣的假設(shè)條件:發(fā)射器的RF功率保持恒定。在天線增益相同時(shí),較大的RF發(fā)射功率將能達(dá)到更遠(yuǎn)處具有相同接收靈敏度的接收器,盡管如此,最大發(fā)射功率應(yīng)符合FCC/CE輻射標(biāo)準(zhǔn)。
此外,載波頻率也會(huì)對(duì)傳輸距離產(chǎn)生影響。當(dāng)波在空間中傳播時(shí),會(huì)發(fā)生散射損耗。自由空間損耗可由下式確定
其中R為距離,λ為波長(zhǎng),f為頻率,C為光速。因此,在相等的自由空間距離上,頻率越高,損耗越大。例如,相較于2.4 GHz,載波頻率為5.8 GHz時(shí)在相同傳輸距離上的衰減將超過(guò)7.66 dB。
RF頻率和頻率切換
AD9361/AD9364輸出覆蓋70 MHz至6 GHz的可編程頻率范圍。這將能滿足大多數(shù)NLOS頻率應(yīng)用,包括不同類型的特許執(zhí)照和免執(zhí)照頻段,比如1.4 GHz、2.4 GHz和5.8 GHz。
2.4 GHz頻段已廣泛用于Wi-Fi、Bluetooth®以及物聯(lián)網(wǎng) (IoT) 短程通信,因此變得越來(lái)越擁擠。該頻段用于無(wú)線視頻傳輸和控制信號(hào)將會(huì)增大信號(hào)干擾的幾率和不穩(wěn)定性。從而導(dǎo)致無(wú)人飛行器陷入不良情況,這些情況往往十分危險(xiǎn)。使用頻率切換技術(shù)保持干凈的頻率通道,將確保數(shù)據(jù)和控制連接更可靠。當(dāng)發(fā)射器覺(jué)察到擁擠頻率時(shí),它會(huì)自動(dòng)切換到其他頻帶。例如,兩架同時(shí)使用相同頻率并且近距離工作的無(wú)人飛行器將會(huì)相互干擾對(duì)方的通信。自動(dòng)切換LO頻率并重新選擇頻帶將有助于維持穩(wěn)定的無(wú)線鏈路。在上電期間自適應(yīng)選擇載波頻率或通道是高端無(wú)人飛行器的一個(gè)杰出特性。
跳頻
廣泛應(yīng)用于電子對(duì)抗 (ECM) 的快速跳頻技術(shù)也有助于避免干擾。通常情況下,如果我們想要跳頻,PLL需在程序執(zhí)行后重新鎖定。該過(guò)程包括寫(xiě)頻率寄存器,然后經(jīng)過(guò)VCO校準(zhǔn)時(shí)間和PLL鎖定時(shí)間,因此跳頻間隔約為幾百微秒。圖7顯示了跳頻發(fā)射器的LO頻率從816.69 MHz跳變至802.03 MHz的例子。AD9361用于正常頻率變化模式,發(fā)射器RF輸出頻率從814.69 MHz跳變至800.03 MHz,參考頻率為10 MHz。跳頻時(shí)間通過(guò)E5052B測(cè)得,如圖7所示。根據(jù)圖7b,VCO校準(zhǔn)和PLL鎖定時(shí)間約為500 μs。信號(hào)源分析儀E5052B可用來(lái)捕捉PLL的瞬態(tài)響應(yīng)。圖7a顯示了瞬態(tài)測(cè)量的寬帶模式,而圖7b和7d以顯著高分辨率顯示了跳頻時(shí)的頻率和相位瞬態(tài)測(cè)量值。6圖7c則顯示了輸出功率響應(yīng)。

圖7. 頻率從804.5 MHz跳變至802 MHz,歷時(shí)500 μs。
500 μs對(duì)于跳頻應(yīng)用來(lái)說(shuō)是一段很長(zhǎng)的時(shí)間間隔。不過(guò),AD9361/ AD9364支持一種快速鎖定模式,通過(guò)將合成器編程信息集(稱為 配置文件)存入器件寄存器或基帶處理器的存儲(chǔ)空間,可使該過(guò) 程比正常頻率變化更快。圖8顯示了通過(guò)快速鎖定模式使頻率從 882 MHz跳變至802 MHz的測(cè)試結(jié)果。根據(jù)圖8d的相位響應(yīng),該時(shí) 間可縮短至20 μs以下。相位曲線參照802 MHz的相位繪制。由于頻 率信息和校準(zhǔn)結(jié)果均已保存在配置文件中,因此省去了SPI寫(xiě)入時(shí) 間和VCO校準(zhǔn)時(shí)間。我們可以看到,圖8b顯示了AD9361/AD9364的 快速跳頻性能。
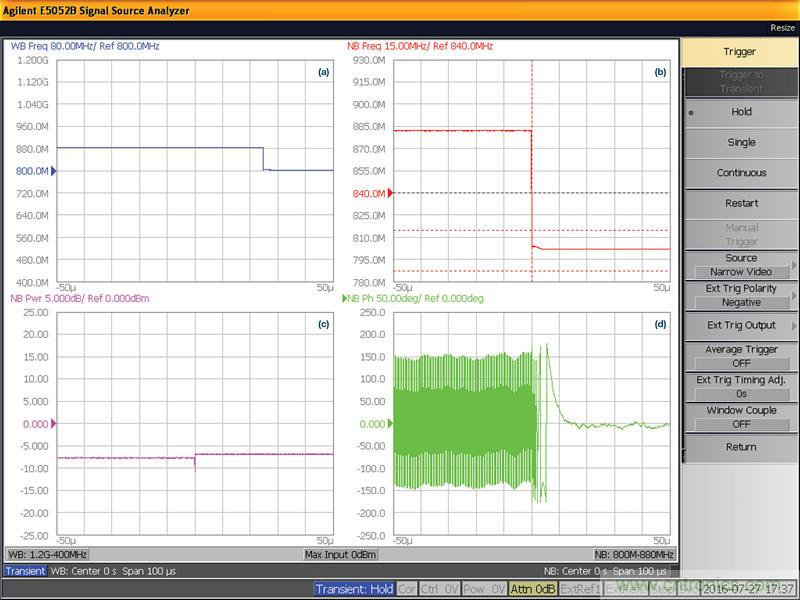
圖8. 在快速鎖定模式下,頻率在20 μs內(nèi)從882 MHz跳變至802 MHz。
物理層的實(shí)現(xiàn)—OFDM
正交頻分多路復(fù)用 (OFDM) 是一種信號(hào)調(diào)制技術(shù),可將高數(shù)據(jù)速率 調(diào)制流劃分到多個(gè)緩慢調(diào)制的窄帶密集的子載波上。因此,信號(hào) 不易受到選擇性頻率衰減的影響。其缺點(diǎn)是峰均功率比較高,并 且對(duì)載波偏移和漂移比較敏感。OFDM廣泛應(yīng)用于寬帶無(wú)線電通 信物理層。OFDM的關(guān)鍵技術(shù)包括IFFT/FFT、頻率同步、采樣時(shí)間同步、碼元/幀同步。IFFT/FFT可通過(guò)FPGA以最快方式實(shí)現(xiàn)。子載波間 隔的選擇也十分重要。該間隔不應(yīng)太小,應(yīng)足以對(duì)抗運(yùn)動(dòng)通信中 的多普勒頻移;但也不應(yīng)太大,以便在有限的頻率帶寬內(nèi)攜帶更 多碼元符號(hào),從而提高頻譜效率。COFDM是指編碼技術(shù)和OFDM調(diào) 制的結(jié)合。COFDM對(duì)信號(hào)衰減的承受能力較強(qiáng),并且具有前向糾 錯(cuò) (FEC) 功能,因此可以從任何移動(dòng)對(duì)象發(fā)送視頻信號(hào)。其編碼技 術(shù)將會(huì)增大信號(hào)帶寬,但此代價(jià)通常是值得的。
通過(guò)將MathWorks基于模型的設(shè)計(jì)和自動(dòng)生成代碼工具與強(qiáng)大的 Xilinx® Zynq SoC以及ADI公司的集成式射頻 (RF) 收發(fā)器相結(jié)合,SDR 系統(tǒng)的設(shè)計(jì)、驗(yàn)證、測(cè)試和實(shí)現(xiàn)可以比以前更高效,進(jìn)而提高無(wú)線 電系統(tǒng)的性能并縮短上市時(shí)間。7
相較于Wi-Fi具有哪些優(yōu)勢(shì)?
配備Wi-Fi的無(wú)人飛行器可以很容易地連接到手機(jī)、筆記本電腦和 其他移動(dòng)設(shè)備,因此使用起來(lái)非常方便。但是,對(duì)于無(wú)人飛行器應(yīng) 用中的無(wú)線視頻傳輸,F(xiàn)PGA和AD9361解決方案具有很多勝過(guò)Wi-Fi 的優(yōu)點(diǎn)。首先,AD9361/AD9364在物理層可通過(guò)捷變頻率切換和快 速跳頻避免干擾。而大多數(shù)集成Wi-Fi芯片仍工作于擁擠的2.4 GHz 頻帶,沒(méi)有頻帶選擇機(jī)制來(lái)確保更穩(wěn)定地?zé)o線連接。
其次,若采用FPGA和AD9361解決方案,可由設(shè)計(jì)工程師靈活定義 和開(kāi)發(fā)傳輸協(xié)議。而Wi-Fi協(xié)議為標(biāo)準(zhǔn)協(xié)議,基于每個(gè)數(shù)據(jù)包的雙 向握手機(jī)制。在使用Wi-Fi時(shí),每個(gè)數(shù)據(jù)包必須確認(rèn)該包已收到并且包中512字節(jié)數(shù)據(jù)在收到時(shí)完整無(wú)缺。如果丟失一個(gè)字節(jié),則整個(gè)512字節(jié)數(shù)據(jù)包必須重新發(fā)送。8雖然該協(xié)議能夠確保數(shù)據(jù)的可靠性,但重新建立無(wú)線數(shù)據(jù)鏈路的過(guò)程非常復(fù)雜且費(fèi)時(shí)。TCP/IP協(xié)議帶來(lái)的高延遲將會(huì)造成非實(shí)時(shí)視頻和控制,從而可能導(dǎo)致無(wú)人飛行器墜落。而SDR解決方案(FPGA加AD9361)使用一個(gè)單向數(shù)據(jù)流,也就是說(shuō),空中的無(wú)人飛行器可像電視廣播一樣傳輸視頻信號(hào)。當(dāng)目標(biāo)是獲取實(shí)時(shí)視頻時(shí),就沒(méi)有重新發(fā)送數(shù)據(jù)包的時(shí)間。
再者,對(duì)于很多應(yīng)用,Wi-F i不能保證適當(dāng)?shù)陌踩燃?jí)。FPG A加AD9361/AD9364解決方案利用加密算法和自定義協(xié)議,因此不易受到安全威脅的影響。
與此同時(shí),單向廣播數(shù)據(jù)流可實(shí)現(xiàn)的傳輸距離是Wi-Fi傳輸距離的兩至三倍。8軟件定義無(wú)線電的靈活性使得數(shù)字調(diào)制/解調(diào)可以根據(jù)距離需求而調(diào)整,并且適應(yīng)復(fù)雜空間輻射環(huán)境中變化的SNR。
結(jié)論
本文闡述了使用FPGA和AD9361/AD9364解決方案實(shí)現(xiàn)高清無(wú)線視頻傳輸?shù)年P(guān)鍵參數(shù)。憑借捷變頻段切換和快速跳頻技術(shù),可建立一個(gè)更穩(wěn)定、可靠的無(wú)線鏈路,以對(duì)抗空間中日益復(fù)雜的輻射環(huán)境并減小墜落幾率。在協(xié)議層,該解決方案使用單向傳輸以縮減無(wú)線鏈路的建立時(shí)間并實(shí)現(xiàn)低延遲連接,因此更靈活。在農(nóng)業(yè)生產(chǎn)、電力線檢查及監(jiān)督等工商業(yè)應(yīng)用中,穩(wěn)定、安全和可靠的傳輸是成功的關(guān)鍵。
參考電路
1 ADI的軟件定義無(wú)線電解決方案。ADI公司。
2 AD9361數(shù)據(jù)手冊(cè)。ADI公司。
3 AD9364數(shù)據(jù)手冊(cè)。ADI公司。
4 Ken Gentile. 應(yīng)用筆記AN-922:數(shù)字脈沖整形濾波器基本知識(shí)。ADI公司。
5Scott R. Bullock。數(shù)字通信的收發(fā)器和系統(tǒng)設(shè)計(jì),第4版。SciTech Publishing,Edison,NJ,2014。
6 E5052B信號(hào)源分析儀,高級(jí)相位噪聲和瞬態(tài)測(cè)量技術(shù)。安捷倫公司,2007年。
7 Di Pu, Andrei Cozma, and Tom Hill. “快速通往量產(chǎn)的四個(gè)步驟:利用基于模型的設(shè)計(jì)開(kāi)發(fā)軟件定義無(wú)線電。”模擬對(duì)話,第49卷, 2015年。
8 John Locke. “DJI Phantom 4的Lightbridge技術(shù)對(duì)比Yuneec TyphoonH的Wi-Fi技術(shù).” Drone Compares.
推薦閱讀:





