

【導(dǎo)讀】在移動(dòng)終端、汽車、物聯(lián)網(wǎng)與工業(yè)等廣泛的市場(chǎng)中,開發(fā)人員一直在積極尋求一種精密的測(cè)距技術(shù),來(lái)實(shí)現(xiàn)精準(zhǔn)的室內(nèi)與室外定位。幸運(yùn)的是,UWB在近期經(jīng)過(guò)“改造”,成為精確、安全的實(shí)時(shí)定位技術(shù),優(yōu)于Wi-Fi、藍(lán)牙和GPS等無(wú)線技術(shù)。
超寬帶技術(shù)能夠?qū)崟r(shí)處理環(huán)境信息,如位置、移動(dòng)及其與UWB設(shè)備間的距離,這些信息已精確到幾厘米,這為系統(tǒng)增添了空間感知能力,從而將推動(dòng)一系列激動(dòng)人心的新應(yīng)用的開發(fā)。為了解UWB的潛力,請(qǐng)務(wù)必考慮UWB在測(cè)量飛行時(shí)間、到達(dá)角、尤其是其安全屬性方面的獨(dú)有特點(diǎn)。
基于UWB的汽車應(yīng)用
更加智能的智能鑰匙
在2019年下半年,汽車制造商紛紛推出計(jì)劃,實(shí)施基于UWB的無(wú)鑰匙汽車門禁,并將探索UWB支持的新用例,如車內(nèi)乘客檢測(cè)、自動(dòng)代客泊車、自動(dòng)泊車、停車場(chǎng)進(jìn)入和免下車支付等。 對(duì)于即將到來(lái)的UWB浪潮,其中一個(gè)備受期待的用例是通過(guò)智能手機(jī)實(shí)現(xiàn)無(wú)鑰匙門禁(PKE)。
通過(guò)PKE,您可以在不使用機(jī)械鑰匙的情況下解鎖和啟動(dòng)汽車。遙控鑰匙裝在您的口袋或錢包中,當(dāng)進(jìn)入解鎖車門的適當(dāng)范圍內(nèi)時(shí),遙控鑰匙會(huì)被“喚醒”。進(jìn)入汽車后,系統(tǒng)會(huì)檢測(cè)到遙控鑰匙,以激活點(diǎn)火啟動(dòng)按鈕。
PKE遙控鑰匙深受汽車制造商的歡迎,因?yàn)樗鼈兡軌蛱峁O大的便利性,并且備受客戶期待。此外,如果使用遙控鑰匙,轉(zhuǎn)向柱將不再需要笨重的鎖芯,這減輕了汽車重量,降低了發(fā)生碰撞時(shí)膝蓋受傷的風(fēng)險(xiǎn)。消費(fèi)者對(duì)這一技術(shù)也十分青睞,因?yàn)闊o(wú)需尋找或撥動(dòng)機(jī)械鑰匙來(lái)開鎖、啟動(dòng)或鎖車,生活變得更加方便了。遺憾的是,如今許多遙控鑰匙也成了竊賊的目標(biāo),他們使用現(xiàn)成可用的廉價(jià)入侵設(shè)備來(lái)檢測(cè)汽車的喚醒信號(hào),然后將該信號(hào)重定向至鑰匙以便喚醒鑰匙,使其強(qiáng)制發(fā)出不必要的開鎖信號(hào)。這就是我們所熟知的中繼攻擊。
中繼攻擊之所以成為可能,是因?yàn)楝F(xiàn)在有一些遙控鑰匙利用信號(hào)強(qiáng)度——不是時(shí)間戳——來(lái)檢測(cè)何時(shí)車主距離汽車兩米內(nèi)。攻擊通常由兩個(gè)人完成,一個(gè)人在鑰匙附近,另一個(gè)人在汽車附近。當(dāng)您走出汽車,比如前往購(gòu)物商場(chǎng)、咖啡廳或餐廳,或者如果您在家,而您的車鑰匙靠近玄關(guān)或窗戶,第一個(gè)竊賊會(huì)盡量接近鑰匙,發(fā)出您汽車所發(fā)送的同類型查詢來(lái)檢測(cè)鑰匙。如果您的鑰匙響應(yīng)查詢,表示其在范圍內(nèi),第一個(gè)竊賊會(huì)捕捉響應(yīng)信號(hào),然后將該信號(hào)發(fā)送(或中繼)給等候在汽車旁的第二個(gè)竊賊。然后,第二個(gè)竊賊使用捕捉到的響應(yīng)信號(hào)欺騙汽車解鎖并啟動(dòng)(圖1)。

圖1:中繼攻擊復(fù)制信號(hào)并使用該信號(hào)開鎖(來(lái)源:恩智浦)
通過(guò)為PKE遙控鑰匙和智能手機(jī)門禁添加UWB,ToF計(jì)算能夠有效地防止中繼攻擊。竊賊檢索的任何信號(hào)都標(biāo)記有時(shí)間戳,指示信號(hào)是在范圍以外的某個(gè)地方生成的。當(dāng)信號(hào)到達(dá)汽車時(shí),計(jì)算得出的行程時(shí)間會(huì)顯示發(fā)出信號(hào)的點(diǎn)過(guò)于遠(yuǎn),無(wú)法開門。拿著午后場(chǎng)電影票的影迷無(wú)法進(jìn)入深夜秀場(chǎng),因?yàn)殡娪捌鄙巷@示的時(shí)間是錯(cuò)誤的而且已過(guò)期,同樣,盜版的UWB信號(hào)不會(huì)讓竊賊進(jìn)入汽車,因?yàn)樾盘?hào)顯示的時(shí)間是錯(cuò)誤的,從本質(zhì)上來(lái)說(shuō)已過(guò)期。
1 UWB的起源與現(xiàn)狀
1960年代,人們首次開發(fā)出UWB,將其用于雷達(dá)應(yīng)用。后來(lái),該技術(shù)經(jīng)過(guò)調(diào)整,用作正交頻分復(fù)用(OFDM)技術(shù),并在IEEE.15.3中標(biāo)準(zhǔn)化為速度高達(dá)480 Mbps的超高數(shù)據(jù)速率傳輸技術(shù)。在這個(gè)容量方面,該技術(shù)與WiFi直接競(jìng)爭(zhēng),但WiFi很快使其數(shù)據(jù)傳輸功能相形見絀,使得UWB在數(shù)據(jù)傳輸用例中退居二線。
基于脈沖無(wú)線電技術(shù),UWB的下一個(gè)角色則成功得多。如IEEE 802.15.4a中指定的,它使用2ns脈沖來(lái)測(cè)量飛行時(shí)間和到達(dá)角的值。 不久后,其安全功能通過(guò)IEEE 802.15.4z中指定的擴(kuò)展得到增強(qiáng)(在PHY/RF級(jí)別),這使其成為獨(dú)特的安全精密測(cè)距和感應(yīng)技術(shù)。
使用智能手機(jī)作為智能鑰匙來(lái)進(jìn)入和啟動(dòng)汽車的想法極具吸引力,因此,汽車和智能手機(jī)行業(yè)的領(lǐng)先企業(yè)紛紛積極參與,在802.15.4z標(biāo)準(zhǔn)中定義安全機(jī)制。UWB為何能夠以如此高的精度處理這么重要的用例?讓我們來(lái)探索一下該技術(shù)的背景和環(huán)境。
2 什么使UWB成為與眾不同?
與大多數(shù)無(wú)線技術(shù)不同,超寬帶(UWB)通過(guò)脈沖無(wú)線電工作。它在寬頻帶上使用一系列脈沖,因此有時(shí)也被稱為IR-UWB或脈沖無(wú)線電UWB。相比之下:衛(wèi)星、Wi-Fi和藍(lán)牙在窄頻帶上使用調(diào)制正弦波來(lái)傳輸信息。
UWB脈沖具有多個(gè)重要特點(diǎn)。首先,它們陡而窄,看起來(lái)像尖峰一樣,即使是在嘈雜的通道環(huán)境中,也很容易識(shí)別。此外,與WiFi或BLE等其他技術(shù)相比,對(duì)于ToF測(cè)距,UWB脈沖更適合密集多徑環(huán)境。由于主信號(hào)路徑旁的對(duì)象會(huì)引起反射或中斷,通過(guò)多個(gè)路徑到達(dá)接收器的無(wú)線電信號(hào)在IR-UWB系統(tǒng)里很容易與主信號(hào)區(qū)分開來(lái)。但這件事在窄帶系統(tǒng)里卻非常耗時(shí)和困難。
UWB在無(wú)線電頻譜的其他部分工作,遠(yuǎn)離聚集在2.4 GHz周圍的繁忙ISM頻段。用于定位和測(cè)距的UWB脈沖在6.5和8 GHz之間的頻率范圍內(nèi)工作,不會(huì)干擾頻譜其他頻段發(fā)生的無(wú)線傳輸。這意味著UWB能夠與現(xiàn)在最流行的無(wú)線形式共存,包括衛(wèi)星導(dǎo)航、Wi-Fi和藍(lán)牙。
在典型功率級(jí)工作時(shí),距離最長(zhǎng)可達(dá)10米左右。但如果使用較高功率脈沖,UWB的距離甚至可達(dá)200米。UWB通信還可以傳輸數(shù)據(jù),其中UWB數(shù)據(jù)包的有效載荷部分以大約7 Mbps的速率發(fā)送數(shù)據(jù),并且可以繼續(xù)加速,最高可達(dá)32 Mbps。
現(xiàn)在,UWB使用調(diào)制脈沖序列,持續(xù)時(shí)間為2ns,非常短。脈沖間距可以相同,也可以不同。脈沖重復(fù)頻率(PRF)從每秒數(shù)十萬(wàn)脈沖到每秒數(shù)十億脈沖不等。通常支持的PRF是62.4 MHz和/或124.8 MHz,分別稱為PRF64和PRF128。UWB的調(diào)制技術(shù)包括脈沖位置調(diào)制和二進(jìn)制相移鍵控。
定義脈沖重復(fù)頻率
● 脈沖發(fā)射器在開與關(guān)之間切換,以特定速率(PRT或PRF)提供峰值功率(Ppeak)。
● 最大距離與發(fā)射器輸出功率直接相關(guān)。系統(tǒng)發(fā)射的能量越多,目標(biāo)檢測(cè)距離將越大。
3 飛行時(shí)間(ToF)的計(jì)算
在科學(xué)和軍事應(yīng)用中,確定兩點(diǎn)(或兩個(gè)設(shè)備)間水平距離的過(guò)程被稱為測(cè)距。飛行時(shí)間(ToF)是測(cè)距的一種形式,使用信號(hào)行程時(shí)間來(lái)計(jì)算距離。圖2提供了ToF計(jì)算在配備UWB的兩臺(tái)設(shè)備中如何工作的基本描述。
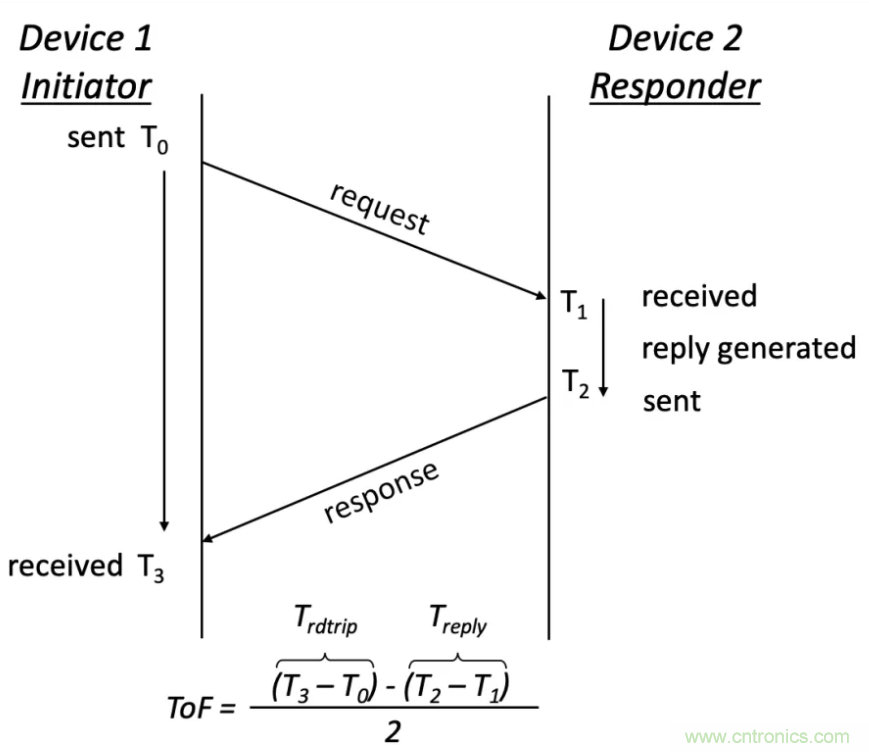
圖2:UWB的飛行時(shí)間計(jì)算,其中設(shè)備1是控制器,設(shè)備2是受控器(來(lái)源:恩智浦)
為了計(jì)算飛行時(shí)間(ToF),我們測(cè)量信號(hào)從到達(dá)點(diǎn)傳輸?shù)紹點(diǎn)所花費(fèi)的時(shí)間。我們選取消息往返時(shí)間的往返讀數(shù),這包括設(shè)備2中的處理時(shí)間。然后減去處理時(shí)間,再除以2,便可得出ToF。為了確定在傳輸過(guò)程中覆蓋了多少地面,將ToF乘以光速即可。
由于UWB的高帶寬(500 MHz),脈沖寬度為納秒級(jí),這提高了精度。與使用窄帶收發(fā)器的WiFi和BLE不同,ToF和測(cè)距的精度限于約+/-1m至+/-5m,而UWB可精確到+/-10cm以內(nèi)。
由于UWB信號(hào)明顯不同且易于讀取,即便在多通道環(huán)境中也是如此,因此當(dāng)脈沖離開和到達(dá)時(shí),信號(hào)更容易識(shí)別,且高度確定。UWB能夠以超高的傳輸速率準(zhǔn)確跟蹤脈沖——在短突發(fā)時(shí)間內(nèi)發(fā)送大量脈沖——因此即使距離非常短,也可以進(jìn)行細(xì)粒度ToF計(jì)算。
調(diào)制正弦波在使用Wi-Fi或藍(lán)牙確定位置時(shí)會(huì)出現(xiàn),其多通道分量只能以復(fù)雜的方式分離。這也就是Wi-Fi和藍(lán)牙為何努力提供精度低于1米的準(zhǔn)確測(cè)量值的部分原因。
圖3對(duì)UWB ToF計(jì)算與Wi-Fi和藍(lán)牙的ToF計(jì)算進(jìn)行了比較。
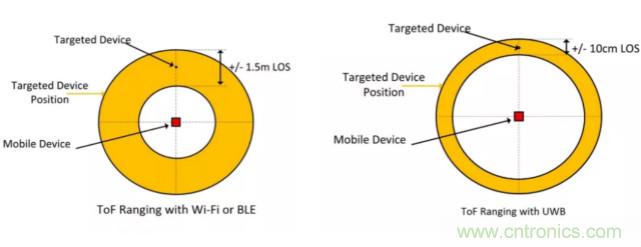
圖3:通過(guò)Wi-Fi和BLE與通過(guò)UWB進(jìn)行的ToF測(cè)距(來(lái)源:恩智浦)
4 可選的到達(dá)角(AoA)計(jì)算
請(qǐng)務(wù)必注意,ToF計(jì)算確定的是徑向距離,而不是方向。也就是說(shuō),ToF計(jì)算告訴設(shè)備1其與設(shè)備2之間的距離,但不告訴設(shè)備2的方向——前、后、左、右、東、南、西還是北。所以ToF圖是一個(gè)圓圈:如果ToF計(jì)算表明設(shè)備2與設(shè)備1之間的距離為15 cm,則以設(shè)備1為圓心,用卷尺在每個(gè)方向測(cè)量15 cm,以此方式形成一個(gè)圓圈,設(shè)備2可以在該圓圈中的任意位置。若要通過(guò)第二次測(cè)量的方式,使用兩個(gè)距離圓圈的交集來(lái)確定位置,則需要額外的設(shè)備。
因此,要完善UWB技術(shù)的討論,我們應(yīng)該考慮另一個(gè)方面,也就是當(dāng)前非汽車應(yīng)用的一個(gè)重要因素:到達(dá)角(AoA)。到達(dá)角可幫助確定設(shè)備2在該圓圈中的哪個(gè)位置。為了計(jì)算AoA,設(shè)備1需要配備一組小心放置的專用天線,這組天線僅用于AoA測(cè)量。并非所有UWB解決方案都包含額外天線,但包含額外天線的UWB能夠精確到幾厘米以內(nèi)(圖4)。
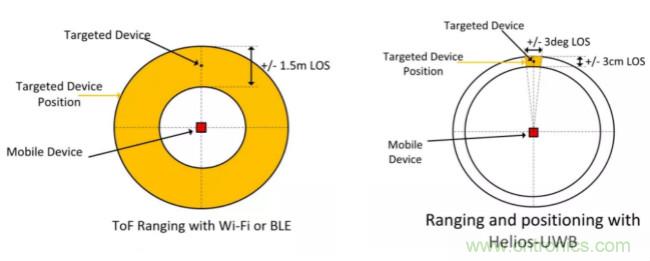
圖4:ToF測(cè)距與AoA生成高準(zhǔn)確度(來(lái)源:恩智浦)
AoA計(jì)算是單獨(dú)進(jìn)行的,與ToF計(jì)算不同,但二者具有相似性:它們都以脈沖定時(shí)開始。在AoA陣列中的每個(gè)天線,接收到的每個(gè)信號(hào)的到達(dá)時(shí)間與相位存在微小但可辨別的差異。記錄每個(gè)信號(hào)的到達(dá)時(shí)間與相位,然后用于類似三角測(cè)量的幾何計(jì)算中,從而確定信號(hào)來(lái)自哪里。
圖5中左圖以設(shè)備1上的兩個(gè)AoA天線Rx1和Rx2為例。與Rx2相比,從設(shè)備2發(fā)出的信號(hào)需要更長(zhǎng)時(shí)間才能到達(dá)Rx1,這表示Rx1、Rx2和信號(hào)原點(diǎn)組成的三角形向右傾斜,指示信號(hào)來(lái)自設(shè)備1的東北方向。
與Rx2相比,從設(shè)備2傳輸?shù)皆O(shè)備1的信號(hào)需要更長(zhǎng)時(shí)間才能到達(dá)Rx1。圖5中右圖顯示的AoA計(jì)算使用到達(dá)時(shí)間和天線間距來(lái)確定每個(gè)傳入信號(hào)的角度,并繪制由Rx1、Rx2和設(shè)備2組成的三角形。在本例中,該三角形中Rx1的邊較長(zhǎng),并指向右邊,這表示設(shè)備2在設(shè)備1的右邊。
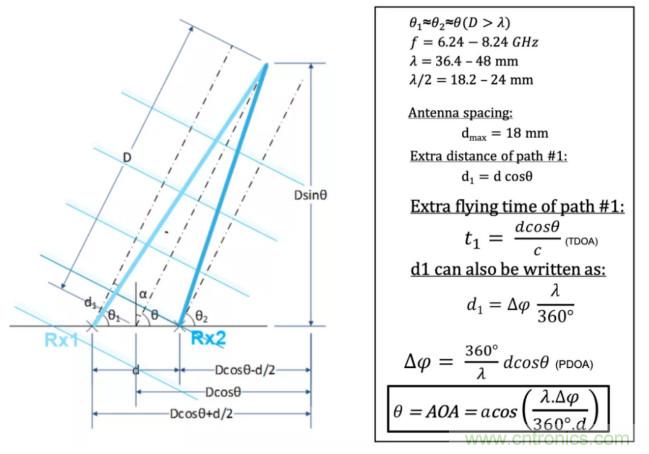
圖5(左):設(shè)備1上兩個(gè)AoA天線Rx1和Rx2的示例;
圖5(右):AoA計(jì)算使用到達(dá)時(shí)間和天線間距來(lái)確定每個(gè)傳入信號(hào)的角度(來(lái)源:恩智浦)
5 UWB如何管理安全性?
UWB中增添的其中一個(gè)重要特性是物理層(PHY)中用于收發(fā)數(shù)據(jù)包的額外部分,這作為即將推出的802.15.4z規(guī)范的一部分進(jìn)行定義。該新特性以恩智浦開發(fā)和推薦的一項(xiàng)技術(shù)為基礎(chǔ),稱為擾頻時(shí)間戳序列(STS)。新特性增添了加密、隨機(jī)數(shù)生成和其他技術(shù),使得外部攻擊者更難訪問(wèn)或操控UWB通信。
6 保護(hù)ToF計(jì)算
飛行時(shí)間計(jì)算很容易受到距離操控的影響。如果您可以干擾時(shí)間戳或計(jì)算的其他方面,就可以使您看起來(lái)比實(shí)際更近。在特定應(yīng)用中,如安全訪問(wèn),這會(huì)欺騙系統(tǒng)認(rèn)為授權(quán)用戶在旁邊(但實(shí)際上并沒(méi)有)并觸發(fā)開鎖(其實(shí)不應(yīng)開鎖),這是個(gè)嚴(yán)重的問(wèn)題。
針對(duì)測(cè)距的原始UWB標(biāo)準(zhǔn)802.15.4a已發(fā)布十多年,對(duì)安全性的重視已經(jīng)跟不上現(xiàn)在的發(fā)展。在測(cè)試4a標(biāo)準(zhǔn)時(shí),研究人員發(fā)現(xiàn),外部攻擊者能夠以超過(guò)99%的概率將測(cè)量的距離減少多達(dá)140米。對(duì)這一特定漏洞的擔(dān)憂促使人們開始修訂4z標(biāo)準(zhǔn)。
具體想法是,通過(guò)為PHY數(shù)據(jù)包添加加密密鑰和數(shù)字隨機(jī)性,阻止ToF相關(guān)數(shù)據(jù)可訪問(wèn)或可預(yù)測(cè)。這有助于抵御使用原始UWB PHY的確定性和可預(yù)測(cè)性質(zhì)來(lái)操控距離讀數(shù)的各種外部攻擊,包括Cicada工具、Preamble注入和早檢測(cè)/晚連接(EDLC)攻擊。更新后的方法能夠提供盡可能最好的保護(hù),避免遭到以操控距離測(cè)量值為目標(biāo)的暴力攻擊。
▲本文作者為恩智浦UWB解決方案產(chǎn)品管理總監(jiān)Rias Al-Kadi和恩智浦汽車UWB產(chǎn)品營(yíng)銷經(jīng)理Christoph Zorn博士。
推薦閱讀:



