

【導(dǎo)讀】急救人員深入精確定位無GPS信號的基礎(chǔ)設(shè)施,十年來一直是消防安全和應(yīng)急人員群體難以達到的目標(biāo)。這個目標(biāo)就是在十幾分鐘內(nèi)精確定位到幾米以內(nèi)。無獨有偶,這些目標(biāo)幾乎與戰(zhàn)術(shù)導(dǎo)彈的引導(dǎo)系統(tǒng)相同,但當(dāng)今的解決方案至少要10000美元,尺寸、重量和功耗高得嚇人,并不可行。同樣的解決方案用于急救作業(yè)領(lǐng)域的早期概念驗證演示,但事實證明實際部署存在(成本和尺寸)障礙。
因此應(yīng)急人員定位仍然是現(xiàn)今最復(fù)雜的定位應(yīng)用。雖然沒有可以實現(xiàn)預(yù)期目標(biāo)的靈丹妙藥式傳感器,但必需有多個技術(shù)節(jié)點,每個節(jié)點都具有前沿性能。此外,它涉及大規(guī)模傳感器融合和系統(tǒng)集成方法。
高性價比、高性能MEMS慣性傳感器現(xiàn)可為潛在的解決方案提供種子。本文提出一個完整的傳感器到云傳感器融合系統(tǒng)設(shè)想,包括高度復(fù)雜的算法。 下面表1描述了主要方法和實現(xiàn)技術(shù)。
表1. 契合關(guān)鍵目標(biāo)的完整系統(tǒng)方法

系統(tǒng)開發(fā)人員所面對的主要挑戰(zhàn)可總結(jié)為以下三大類:程序、環(huán)境和傳感器融合。在設(shè)計多傳感器解決方案的過程中,對于急救任務(wù)的高度復(fù)雜性以及各種極端環(huán)境帶來的挑戰(zhàn),必須要有全面的了解。
程序
火災(zāi)搜救任務(wù)必須嚴(yán)格按照救援程序執(zhí)行,同時必須適應(yīng)完全不確定的現(xiàn)實生活場景??刹渴鸬木_定位系統(tǒng)必須在最大限度內(nèi)適應(yīng)現(xiàn)有的流程和設(shè)備。這就要求無需任何固定或臨時基礎(chǔ)設(shè)施即可操作,因為急救人員通常已背負(fù)重要設(shè)備(重量和成本)。任何系統(tǒng)開發(fā)都應(yīng)遵從實現(xiàn)小型嵌入式設(shè)備的早期階段目標(biāo)且單位急救人員成本與智能手機相似。有必要指出,目前智能手機的定位性能嚴(yán)重不足,因此面臨著挑戰(zhàn)。圖1概述了理想系統(tǒng)最相關(guān)的主要和次要運行要求。

圖1. 關(guān)鍵作業(yè)要求定義急救人員產(chǎn)品設(shè)計問題。
環(huán)境
雖然GPS覆蓋使得室外定位無處不在,但并不支持完全室內(nèi)或混合(室內(nèi)/挑戰(zhàn)室外)環(huán)境。一些室內(nèi)定位環(huán)境(例如購物中心)可以通過安裝基礎(chǔ)設(shè)施實現(xiàn) — 但是,這些既不精確也不切合急救作業(yè)的實際目標(biāo)。對于追蹤系統(tǒng)設(shè)計人員,必須考慮以下因素來確定設(shè)計、組件選擇和降低風(fēng)險的方法:
● RF 傳播路徑。
● 傳感器溫度/沖擊影響。
● 基礎(chǔ)設(shè)施損壞/改變的可能性。
傳感器融合
先前提到的過程和環(huán)境中的挑戰(zhàn)是傳感器融合問題核心設(shè)計方法的基礎(chǔ)。相關(guān)的主要傳感模式用于在關(guān)鍵操作模式中提供高性能,同時互補傳感器則掃除每個應(yīng)用階段的關(guān)鍵障礙,如表2所示。
表2. 候選傳感器的優(yōu)勢和不足
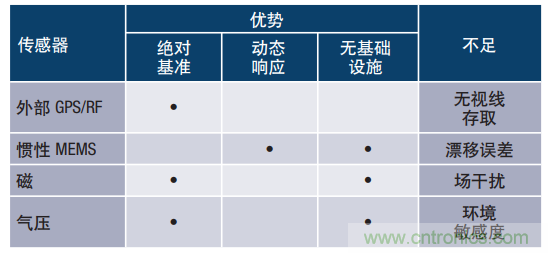
由于MEMS無需外部基礎(chǔ)設(shè)施,并能在動態(tài)環(huán)境下提供精密檢測,因此如果能在極端環(huán)境中工作以及如果與合適的次級傳感器配合使用,它將在總體解決方案中發(fā)揮主要作用。
MEMS進展
消費類慣性MEMS設(shè)備已迅速轉(zhuǎn)向商品化(比較注重性能規(guī)格),軍用MEMS價格仍然異常高昂,工業(yè)和汽車業(yè)MEMS(參見圖2)目標(biāo)是同時保證性能和成本水平。
圖2. 即使在極端運動動力學(xué)條件下,工業(yè)MEMS設(shè)備也能夠降低噪聲和穩(wěn)定運行。
與消費類領(lǐng)域相比,工業(yè)和汽車領(lǐng)域需要在相對復(fù)雜和極端的環(huán)境中精確檢測,供應(yīng)商集成的架構(gòu)特性專門針對會影響性能的因素,例如,離軸運動、震動和沖擊事件,以及時間和溫度引起的誤差。雖然這些設(shè)計特性往往最容易通過更大的傳感器或更昂貴的處理過程來適應(yīng),汽車業(yè)和越來越重要的工業(yè)市場的經(jīng)濟壓力,迫使采用更關(guān)鍵的方法設(shè)計性能,并實現(xiàn)成本效益。
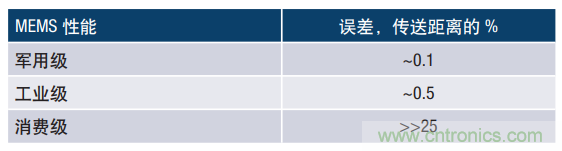
最終專門針對工業(yè)應(yīng)用開發(fā)出具有高性價比的MEMS組件,如表3所示,對三個主要類別組件的傳送距離相關(guān)誤差百分比進行了對比。工業(yè)級MEMS可提供與高端軍事設(shè)備一樣優(yōu)質(zhì)的導(dǎo)航能力,同時與商品化消費MEMS組件有合理的價格差。
表3. MEMS導(dǎo)航性能級別與傳送距離誤差百分比
這種優(yōu)勢的原因需要仔細(xì)觀察與目標(biāo)應(yīng)用相關(guān)的MEMS組件的關(guān)鍵規(guī)格。對于急救作業(yè)目標(biāo),MEMS傳感器的一個關(guān)鍵任務(wù)是識別當(dāng)前的運動類型并測量步數(shù)和步幅。不同于行人運動模型,急救人員運動將更加隨機、動態(tài)和難以識別。此外,由于存在精度目標(biāo),傳感器必須能夠抑制錯誤運動,例如震動、沖擊以及腳或身體左右搖晃/搖擺。
急救人員模型并非對于行人模型可能足夠的傳感器噪聲簡單精度分析,它還必須包括關(guān)鍵規(guī)格,例如線性g抑制和跨軸靈敏度。圖4對工業(yè)和低端MEMS設(shè)備的三個重要RSS誤差規(guī)格進行了比較。很容易看出,噪聲并非不利因素,而很多低端設(shè)備未指定的線性g和跨軸性能卻是主要的問題。
表4. 工業(yè)和低端MEMS的RSS誤差比較,表明噪聲不是性能影響因素

假設(shè)條件:50 Hz BW,2 g rms震動,100º/sec離軸旋轉(zhuǎn)。
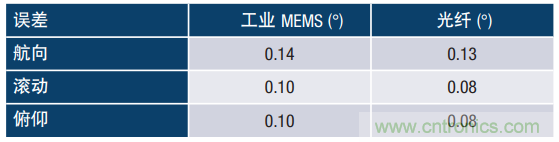
雖然只是短短幾年前,高性能慣性傳感器僅能通過光纖等方法來實現(xiàn),現(xiàn)在工業(yè)MEMS工藝已明確證明它們完全可以勝任,關(guān)鍵導(dǎo)航指標(biāo)比較見以下表5。
表5. 高性價比工業(yè)MEMS與傳統(tǒng)光纖陀螺儀關(guān)鍵導(dǎo)航指標(biāo)的比較
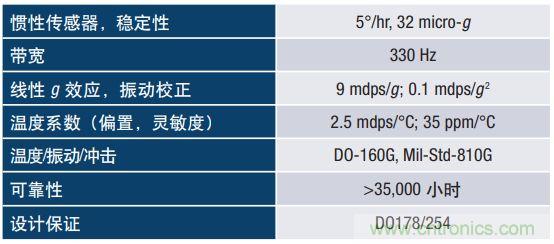
工業(yè)MEMS IMU示例為ADIS16488A,如圖2所示,其中包含10自由度高性能傳感,并適合最苛刻的應(yīng)用,商業(yè)航空電子設(shè)備(如表6所示),證明了其對于急救極端應(yīng)用已做好準(zhǔn)備。

表6. ADIS16488A MEMS IMU;高性價比和成熟的高性能及可靠性
慣性MEMS性能的進步和持續(xù)驗證的質(zhì)量與耐用性,現(xiàn)正與集成方面的重大進步相結(jié)合。最后一個障礙特別具有挑戰(zhàn)性,因為如果不精心管理,傳感器尺寸與性能和耐用性成反比。具有高度戰(zhàn)略性、協(xié)調(diào)性和挑戰(zhàn)性的一系列工藝進步必須通過測試和合并來滿足該應(yīng)用所需的性能密度水平,如圖3所示。
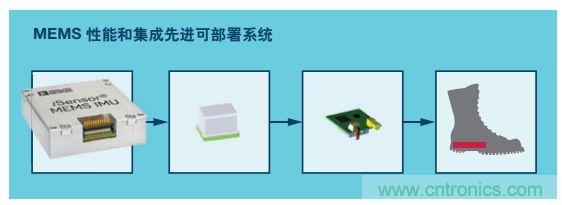
圖3. 工業(yè)MEMS IMU具有先進的性能、尺寸、成本和集成度(不受影響),僅支持急救等重要應(yīng)用。
傳感器權(quán)重
針對給定的應(yīng)用選擇適當(dāng)?shù)膫鞲衅鲿r,應(yīng)先進行深入分析,了解其在總體任務(wù)的不同階段中的權(quán)重(相關(guān)性)。對于行人航位推算,解決方案主要取決于可用的設(shè)備(如智能手機中的嵌入式傳感器),而不是通過性能設(shè)計。因此,會嚴(yán)重依賴GPS,與其他可用的傳感器,例如嵌入慣性和磁性,僅為確定有用的位置信息發(fā)揮一小部分作用。它在外部工作正常,但在具有挑戰(zhàn)性的城市環(huán)境或室內(nèi),GPS不可用,其他可用傳感器的質(zhì)量很差,存在較大差距,換言之,位置信息的質(zhì)量具有不確定性。盡管先進的濾波器和算法通常用來合并這些傳感器,無需任何額外傳感器或質(zhì)量更好的傳感器,軟件對于彌補不確定性差距的作用不大,最終只是大大降低了報告位置的信心。圖4中為概念性說明。
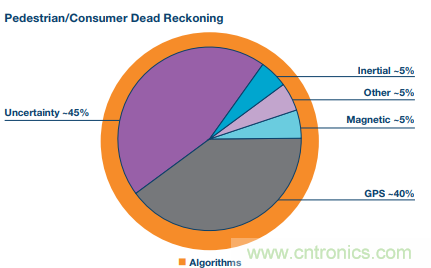
圖4. 基于智能手機的行人導(dǎo)航主要依賴于GPS,以非優(yōu)化預(yù)嵌入傳感器輔助,在運動檢測的高置信度或可靠的覆蓋范圍方面存在僅憑算法無法修復(fù)的較大差距。
相比之下,工業(yè)航位推算方案,例如急救作業(yè),針對系統(tǒng)定義性能和根據(jù)具體精度要求選擇組件而設(shè)計。更佳質(zhì)量的慣性傳感器允許其發(fā)揮主要作用,適當(dāng)利用其他傳感器來縮小不確定性差距。比起推算/估算可靠的傳感器讀數(shù)間的位置,算法在概念上更關(guān)注最佳權(quán)重、切換和傳感器互相關(guān),以及對于環(huán)境和實時運動動力學(xué)的認(rèn)識(參見圖5)。
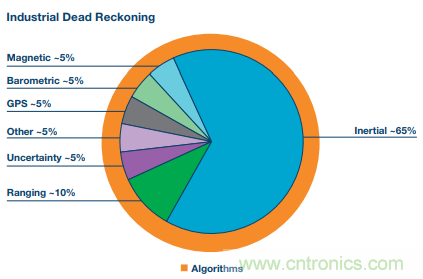
圖5. 傳感器專門針對全面覆蓋急救任務(wù)范圍進行選擇,系統(tǒng)的精度和可靠性大大提高。
精度在以上任何一種情況下都可以通過改善質(zhì)量的傳感器來提高,雖然傳感濾波和算法是解決方案的重要一部分,但它們本身并不能消除受限質(zhì)量傳感器覆蓋范圍的差距。
精確定位和映射(PLM)系統(tǒng)
在具體的急救人員追蹤案例中,任務(wù)被劃分為以下幾個階段,以便更好地評估傳感器處理要求:抵達現(xiàn)場、部署、進入建筑內(nèi)部并援—— 表7.設(shè)想消防車配備了高端GPS/INS系統(tǒng),能夠確定到達現(xiàn)場車輛的位置,作為已知的參考點。從這一點直到消防員進入建筑前,存在不確定和隨機運動序列,其精確位置和映射系統(tǒng)依賴于實施的超寬頻范圍,才能精確鎖定消防員位置和方向。進入建筑結(jié)構(gòu)后,慣性傳感器成為主要追蹤傳感器,目標(biāo)是提供幾米的定位精度。
如果需要,可將系統(tǒng)設(shè)計為完全依靠慣性傳感器,但也可以利用其他可用和可靠的隨機發(fā)射信號,例如UWB范圍信號、磁力計校正和氣壓測量。如前所述,實施的算法不僅追蹤位置,還可生成搜索模式的實時路徑圖。如果消防員下落或遇險,最初路徑生成的地圖就是也通過慣性檢測引導(dǎo)的救援消防員的增補傳感器輸入。
表7. 急救任務(wù)不同階段的傳感器要求

雖然高性能傳感器一定是PLM系統(tǒng)的核心,但以下也是實現(xiàn)系統(tǒng)的關(guān)鍵因素:
● 深入了解傳感器組件,以及其在壓力下的漂移特性/局限性。
● 全面了解人體運動模型。
● 詳細(xì)的應(yīng)用級別見解和操作模式定義。
提供實施傳感器融合處理的定義、指南和界限(參見圖 6)。處理的核心是粒子濾波器,它可以隨時間推移追蹤多個可能的運動,隨著濾波器對其進行區(qū)分消除錯誤路徑。傳感器自身分布于消防員,以實現(xiàn)最佳性能,無線體感網(wǎng)以及加固型回程通信網(wǎng)絡(luò)無縫連接消防員、救援人員、指揮與控制,以及可行且有用的基于云的地圖和協(xié)調(diào)系統(tǒng)。
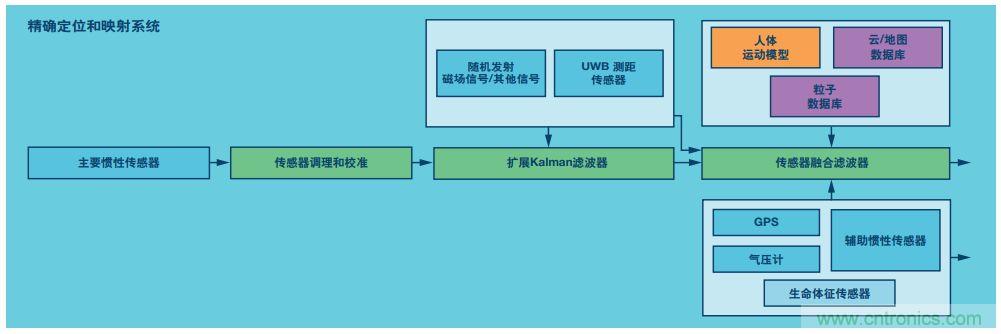
圖6. PLM系統(tǒng)是基于高性能傳感器、互補傳感器濾波和處理以及云數(shù)據(jù)庫和分析的完整傳感器融合解決方案。輸出精確位置和搜索路徑圖。
精確定位和映射系統(tǒng)提供了無基礎(chǔ)設(shè)施方法來檢測位置,利用高性能傳感器和先進的算法來優(yōu)化合并所有隨機發(fā)射信號。系統(tǒng)目標(biāo)是達到米級精度并生成實時路徑圖。工業(yè)級MEMS慣性傳感器技術(shù)的進步支持PLM,完整的系統(tǒng)開發(fā)方法既可解決技術(shù)障礙,同時還能實現(xiàn)商業(yè)指標(biāo)。
后續(xù)工作重點是集成最新一代傳感器領(lǐng)先優(yōu)勢,并適應(yīng)急救作業(yè)方案的新觀念。最終集成將包括優(yōu)化尺寸和本體位置,以及更完整的所需通信鏈路和最終系統(tǒng)資質(zhì)實施方案。
推薦閱讀:



