
【導(dǎo)讀】本文介紹的是一款高性能旋變數(shù)字 轉(zhuǎn)換器(RDC)電路,可在汽車(chē)、航空電子和關(guān)鍵工業(yè)等要求寬溫度范圍內(nèi)具有高穩(wěn)定性的應(yīng)用中精確測(cè)量角度位置和速度。
電路功能與優(yōu)勢(shì)
圖1所示電路是一款高性能旋變數(shù)字轉(zhuǎn)換器(RDC)電路,可在汽車(chē)、航空電子和關(guān)鍵工業(yè)等要求寬溫度范圍內(nèi)具有高穩(wěn)定性的應(yīng)用中精確測(cè)量角度位置和速度。高電流驅(qū)動(dòng)器AD8397可將310 mA電流驅(qū)動(dòng)到32 Ω負(fù)載,從而無(wú)需分立式推挽緩沖器解決方案。
RDC常被用于汽車(chē)和工業(yè)市場(chǎng),用來(lái)提供電機(jī)軸位置和/或速度反饋信息。
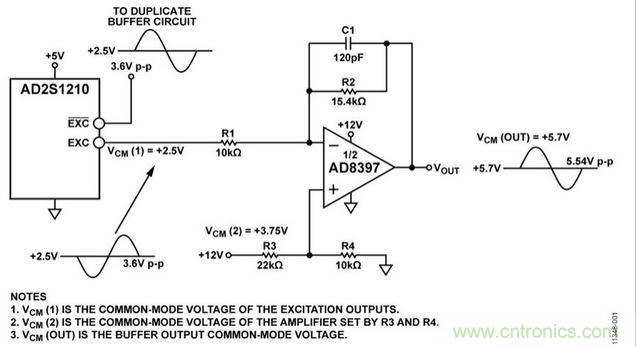
圖1. 采用AD8397的高電流緩沖器支持AD2S1210 RDC激勵(lì)信號(hào)輸出(原理示意圖,未顯示去耦和所有連接)
電路描述
AD2S1210是一款完整的10位至16位分辨率跟蹤RDC,片內(nèi)集成可編程正弦波振蕩器,為旋變器提供激勵(lì)。由于工作環(huán)境惡劣,AD2S1210(C級(jí)和D級(jí))的額定溫度范圍為-40°C至+125°C的擴(kuò)展工業(yè)溫度范圍。
圖1所示的高電流驅(qū)動(dòng)器采用雙通道運(yùn)算放大器AD8397,用來(lái)放大AD2S1210參考振蕩器激勵(lì)輸出并進(jìn)行電平轉(zhuǎn)換,從而優(yōu)化與旋變器的接口。另外一路互補(bǔ)激勵(lì)驅(qū)動(dòng)電路與圖1類(lèi)似,從而提供一個(gè)全差分信號(hào)來(lái)驅(qū)動(dòng)旋變器初級(jí)繞組。AD8397是一款低失真、高輸出電流和寬輸出動(dòng)態(tài)范圍放大器,非常適合與旋變器一同使用。AD8397能將310 mA電流驅(qū)動(dòng)到32 Ω負(fù)載,以便為旋變器提供所需的功率,而無(wú)需使用傳統(tǒng)的分立式推挽輸出級(jí)。傳統(tǒng)推挽電路需要額外的元件,與之相比,本文提供的方案可簡(jiǎn)化驅(qū)動(dòng)器電路,而且功耗更低。AD8397采用8引腳窄體SOIC封裝,額定溫度范圍為-40°C至+85°C工業(yè)溫度范圍。
RDC利用正弦信號(hào)來(lái)確定受正弦波參考信號(hào)激勵(lì)的旋變器的角度位置和/或速度。 初級(jí)繞組上的旋變器激勵(lì)參考信號(hào)被轉(zhuǎn)換為兩個(gè)正弦差分輸出信號(hào):正弦和余弦。 正弦和余弦信號(hào)的幅度取決于實(shí)際的旋變器位置、旋變器轉(zhuǎn)換比和激勵(lì)信號(hào)幅度。
RDC同步采樣兩個(gè)輸入信號(hào),以便向數(shù)字引擎(即所謂Type II跟蹤環(huán)路)提供數(shù)字化數(shù)據(jù)。 Type II跟蹤環(huán)路負(fù)責(zé)計(jì)算位置和速度。 典型應(yīng)用電路如圖2所示。
由于旋變器的輸入信號(hào)要求,激勵(lì)緩沖器必須提供高達(dá)200 mA的單端電流。 圖1所示的緩沖電路不僅提供電流驅(qū)動(dòng)能力,而且還提供AD2S1210激勵(lì)輸出信號(hào)的增益。
典型旋變器的輸入電阻在100 Ω至200 Ω之間,初級(jí)線圈必須利用7 V rms的電壓激勵(lì)。
AD2S1210的額定頻率范圍為2 kHz至20 kHz。該轉(zhuǎn)換器支持3.15 V p-p ±27%范圍的輸入信號(hào)。 采用Type II跟蹤環(huán)路跟蹤輸入信號(hào),并將正弦和余弦輸入信息轉(zhuǎn)換為輸入角度和速度所對(duì)應(yīng)的數(shù)字。 該器件的額定最大跟蹤速率為3125 rps。
在16位分辨率時(shí),位置輸出的精度誤差最大值為±5.3弧分。
AD2S1210采用5 V電源供電,用作輸出緩沖電路的AD8397要求12 V電源,以便向旋變器提供所需的差分信號(hào)幅度。
圖1顯示了AD2S1210和配置為差分驅(qū)動(dòng)器的AD8397的原理圖。AD8397一個(gè)極具吸引力的特性是,驅(qū)動(dòng)高負(fù)載時(shí),其輸出能夠提供高線性輸出電流。例如,驅(qū)動(dòng)32 Ω負(fù)載時(shí),輸出電流最高可達(dá)310 mA,同時(shí)保持-80 dBc的無(wú)雜散動(dòng)態(tài)范圍(SFDR)。由于其高輸出電流,AD8397能夠?yàn)樾兤魈峁┧璧墓β?,而無(wú)需使用分立式推挽電路。
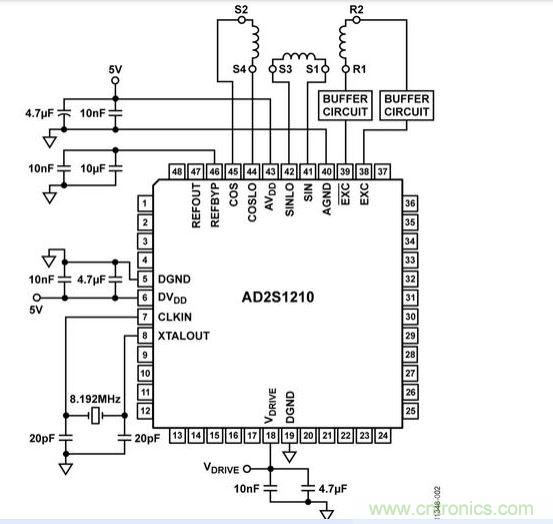
圖2. AD2S1210 RDC典型應(yīng)用電路
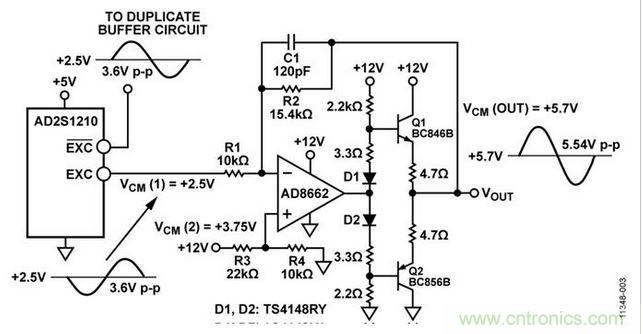
圖3. 分立式推挽驅(qū)動(dòng)器電路
對(duì)于100 Ω至200 Ω輸入電阻,驅(qū)動(dòng)旋變器所需的電流為200 mA。 圖3所示的分立方案提供一個(gè)推挽輸出級(jí),這不僅會(huì)增加驅(qū)動(dòng)器電路的成本,而且即使沒(méi)有信號(hào)存在時(shí),也會(huì)產(chǎn)生少量靜態(tài)功耗。
圖1中的緩沖級(jí)可降低功耗并減少元件數(shù),同時(shí)實(shí)現(xiàn)像推挽電路一樣的驅(qū)動(dòng)能力。
AD2S1210的激勵(lì)輸出通常在EXC和EXC輸出端提供3.6 V p-p正弦信號(hào),由此產(chǎn)生一個(gè)7.2 V p-p差分信號(hào)。
汽車(chē)旋變器的典型變換比為0.286。因此,如果將一個(gè)單位增益緩沖器配合AD2S1210使用,則旋變器輸出的幅度約為差分2 V p-p。 這種信號(hào)的幅度不足以滿足AD2S1210的輸入幅度要求。 理想情況下,正弦和余弦輸入具有差分3.15 V p-p的幅度,因此AD8397必須提供約1.5倍的增益。
圖1所示激勵(lì)緩沖器的增益通過(guò)電阻R1和R2設(shè)置。在電路測(cè)試期間,R1和R2電阻的值分別為10 kΩ和15.4 kΩ,對(duì)應(yīng)的增益為1.54。
EVAL-AD2S1210SDZ評(píng)估板上有跳線選項(xiàng),可將R2更改為8.66 kΩ,此時(shí)提供的增益為0.866。對(duì)于轉(zhuǎn)換比為0.5的旋變器,這種增益設(shè)置為正弦和余弦輸入提供3.12 V p-p差分幅度信號(hào)。
電阻R3和R4將放大器的共模電壓設(shè)置為VCM (2) = 3.75 V。激勵(lì)輸出的共模電壓為VCM (1) = 2.5 V(中間電源電壓),相當(dāng)于緩沖器輸出共模電壓約為VCM (OUT) = 5.7 V(12 V電源的大約一半)。
由于所選的拓?fù)浣Y(jié)構(gòu)可以采用單電源供電,因此針對(duì)緩沖器選擇的運(yùn)算放大器也必須能夠采用單供電軌供電。AD8397采用12 V單電源供電,提供軌到軌輸出,因而是理想的選擇。
[page]
測(cè)量
EVAL-AD2S1210SDZ評(píng)估板提供了跳線選項(xiàng),支持使用圖1所示的集成驅(qū)動(dòng)器或圖3所示的分立驅(qū)動(dòng)器。
圖4顯示了分立式推挽電路和采用AD8397的集成緩沖器的信號(hào)質(zhì)量。使用Rohde & Schwarz RTO1024(快速傅里葉變換FFT)分析輸出信號(hào),并測(cè)量基波和諧波功率。激勵(lì)頻率設(shè)置為10 kHz。
增益設(shè)置為1.54時(shí),AD8397在兩種配置中均提供5.54 V p-p的輸出信號(hào)?;üβ始s為18 dBm,驅(qū)動(dòng)RTO1024的50 Ω典型輸入阻抗。
然后,根據(jù)信號(hào)的基頻和諧波功率值計(jì)算信納比(SINAD)和總諧波失真(THD)。對(duì)于推挽電路,SINAD = 50.9615 dB,THD = 25.66%;對(duì)于AD8397緩沖器,SINAD = 54.8 dB,THD = 25.51%。這一計(jì)算使得兩種配置可以相互比較。
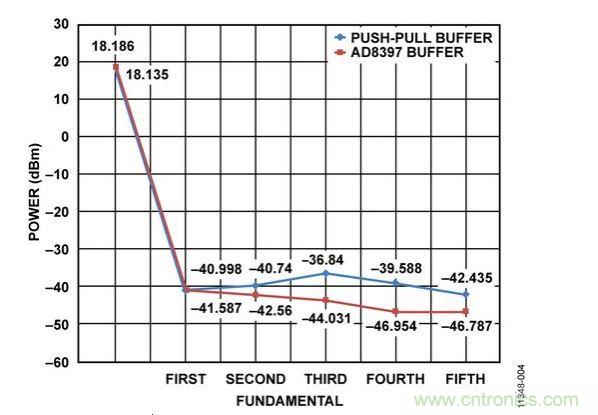
圖4. 推挽和AD8397輸出信號(hào)對(duì)比
下一步要證明:即使輸出端存在高電流,AD8397電路也能傳送激勵(lì)信號(hào)。 圖5所示的測(cè)試電路 通過(guò)加重輸出負(fù)載確定AD8397電路性能。
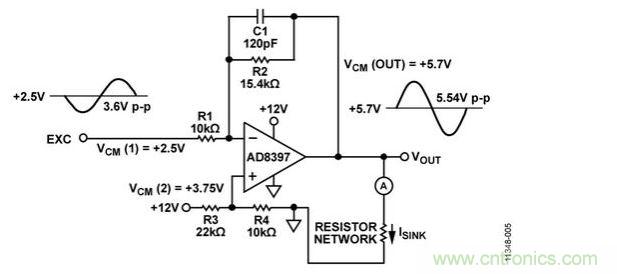
圖5. AD8397的帶載測(cè)試電路
AD8397在驅(qū)動(dòng)32 Ω負(fù)載時(shí)可以輸出高達(dá)310 mA的低失真輸出電流。旋變器輸入電阻通常在100 Ω至200 Ω范圍內(nèi)。
圖6顯示了吸收AD8397輸出端310 mA電流時(shí)的激勵(lì)信號(hào)。輸出仍能維持其信號(hào)強(qiáng)度,因而能夠驅(qū)動(dòng)典型旋變器。
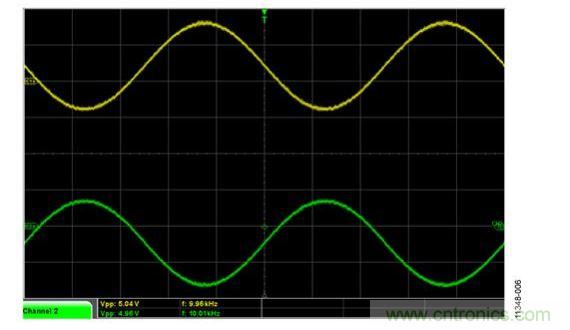
圖6. 吸收AD8397輸出端310 mA電流
如果連接到旋變器,AD8397提供的激勵(lì)信號(hào)可以在AD2S1210輸入范圍要求內(nèi)產(chǎn)生正弦和余弦信號(hào)。
[page]
建議
電容C1與電阻R2并聯(lián)形成一個(gè)低通濾波器,用來(lái)濾除EXC和EXC輸出上存在的任何噪聲。選擇此濾波器的截止頻率時(shí),應(yīng)確保濾波器所引起的載波相移不超過(guò)AD2S1210的鎖相范圍。注意,C1不是必需的,因?yàn)樾兤骺梢詾V除AD2S1210激勵(lì)輸出中的高頻成分。
在電路驗(yàn)證過(guò)程中,旋變器的輸出直接連接到AD2S1210輸入。用戶應(yīng)用中經(jīng)常會(huì)使用額外調(diào)整電阻和/或無(wú)源RC濾波器。在AD2S1210之前可以使用額外無(wú)源元件,但不要超過(guò)產(chǎn)品數(shù)據(jù)手冊(cè)規(guī)定的AD2S1210最大鎖相范圍。外部無(wú)源元件可能會(huì)導(dǎo)致通道間幅度不匹配誤差,這會(huì)直接轉(zhuǎn)化為位置誤差。因此,信號(hào)路徑中推薦使用至少1%容差的電阻和5%容差的電容。
根據(jù)應(yīng)用和傳感器的具體要求,可以更改AD2S1210和AD8397周?chē)脑怠@?,通過(guò)改變電阻值,用戶可以調(diào)整偏置電壓、幅度和緩沖電路輸出端的最大驅(qū)動(dòng)能力。
常見(jiàn)變化
圖1所示的緩沖電路可以在不做任何修改的情況下與ADI公司的其他RDC一起使用,例如AD2S1200和AD2S1205。 要改變輸出幅度、驅(qū)動(dòng)能力和失調(diào)電壓,應(yīng)適當(dāng)調(diào)整無(wú)源元件。
電路評(píng)估與測(cè)試
可使用EVAL-AD2S1210SDZ評(píng)估板來(lái)評(píng)估和測(cè)試AD2S1210及CN-0317電路。CN-0317設(shè)計(jì)支持包提供了詳細(xì)原理圖、布局布線以及物料清單。
EVAL-AD2S1210SDZ用戶指南完整說(shuō)明了如何使用評(píng)估板的硬件和軟件。
設(shè)備要求
需要以下設(shè)備:
● 帶USB端口的Windows 7(或更新版)PC
● EVAL-AD2S1210SDZ評(píng)估板
● EVAL-SDP-CB1Z SDP-B控制板
● EVAL-AD2S1210SDZ評(píng)估軟件
● 9 V壁式直流電源(隨同EVAL-AD2S1210SDZ評(píng)估板提供)
● 旋變器(例如Tamagawa TS2620N21E11)
開(kāi)始使用
設(shè)置電路評(píng)估的步驟如下:
1.安裝評(píng)估軟件光盤(pán)中的評(píng)估軟件。安裝軟件時(shí),確保EVAL-SDP-CB1Z板與PC的USB斷開(kāi)連接。安裝之后,PC可能需要重啟。
2.確保按照EVAL-AD2S1210SDZ用戶指南的表2所示配置各種鏈路選項(xiàng)。
3.按照?qǐng)D7所示將SDP板連接到評(píng)估板。
4.將套件包含的9 V電源適配器連接到評(píng)估板上的接頭J702。
5.通過(guò)USB電纜將SDP板連接到PC。
6.從程序菜單中的Analog Devices子文件夾下運(yùn)行評(píng)估軟件。
7.將旋變器的EXC、EXC、SIN、SIN、COS和COS線連接到接頭J5和接頭J6,如圖7所示。
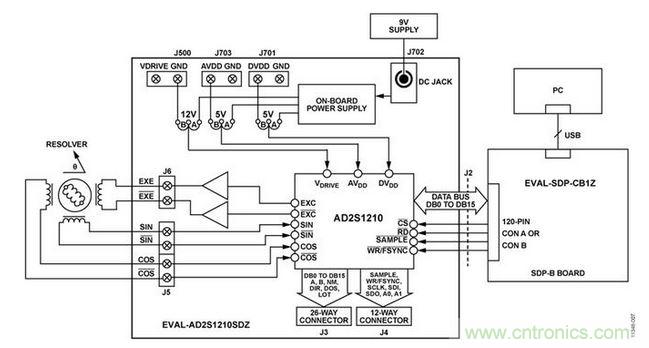
圖7. 測(cè)試設(shè)置功能框圖
測(cè)試
一旦USB通信建立,EVAL-SDP-CB1Z就可用來(lái)發(fā)送、接收、采集來(lái)自EVAL-AD2S1210SDZ的并行數(shù)據(jù)。
圖8為使用該電路測(cè)量位置和速度時(shí)評(píng)估軟件采集選項(xiàng)卡的輸出顯示。
圖9為EVAL-AD2S1210SDZ評(píng)估板與EVAL-SDP-CB1Z板相連的照片。
有關(guān)測(cè)試設(shè)置、校準(zhǔn)以及如何使用評(píng)估軟件來(lái)捕捉數(shù)據(jù)的完整詳細(xì)信息,請(qǐng)參閱EVAL-AD2S1210SDZ評(píng)估板用戶指南。
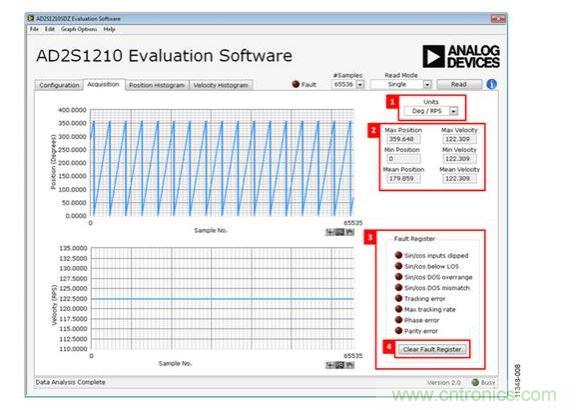
圖8. 評(píng)估軟件輸出顯示——采集選項(xiàng)卡中的位置和速度數(shù)據(jù)

圖9. EVAL-AD2S1210SDZ評(píng)估板與EVAL-SDP-CB1Z SDP板相連的照片


